製品情報
製品・シリーズを選ぶ













課題解決
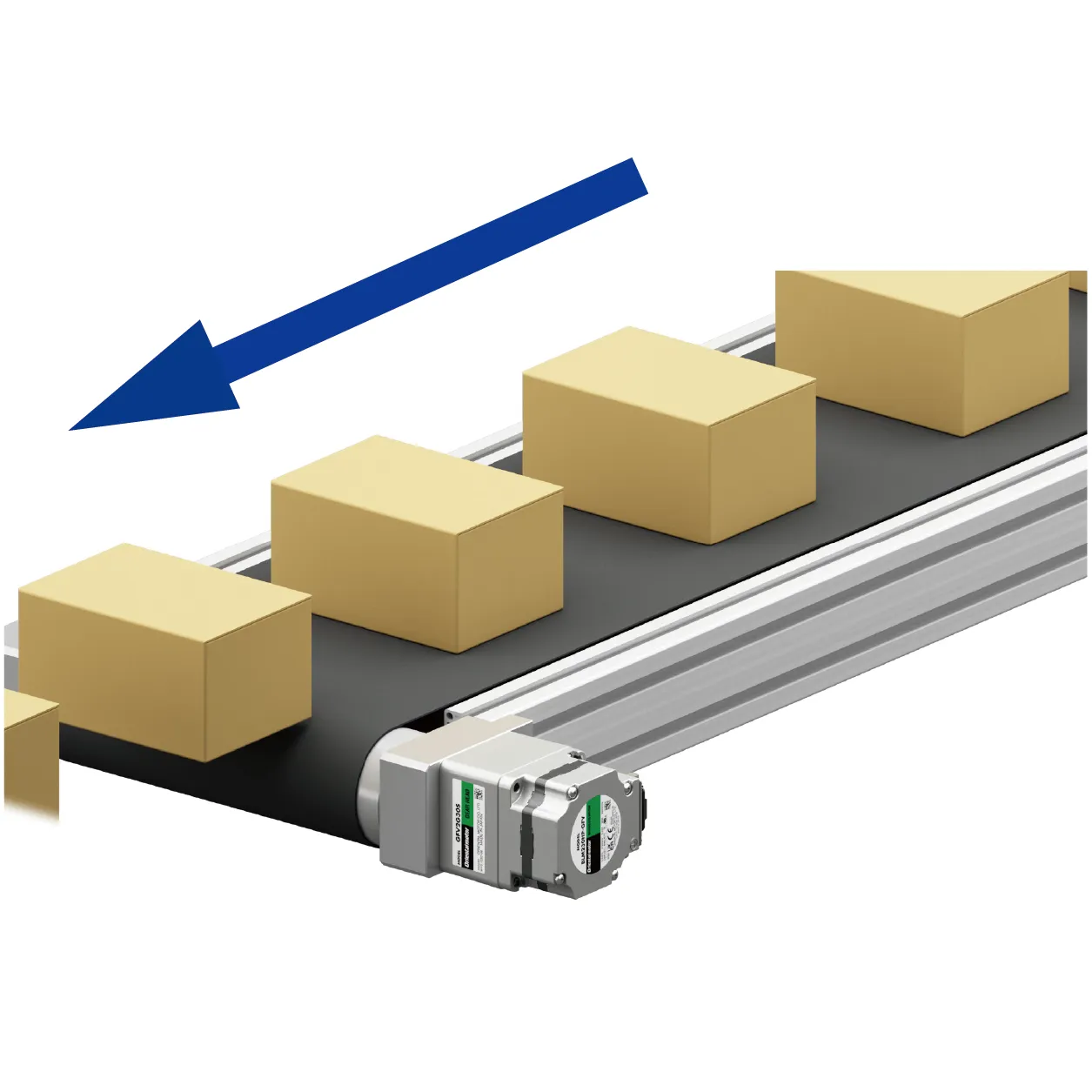
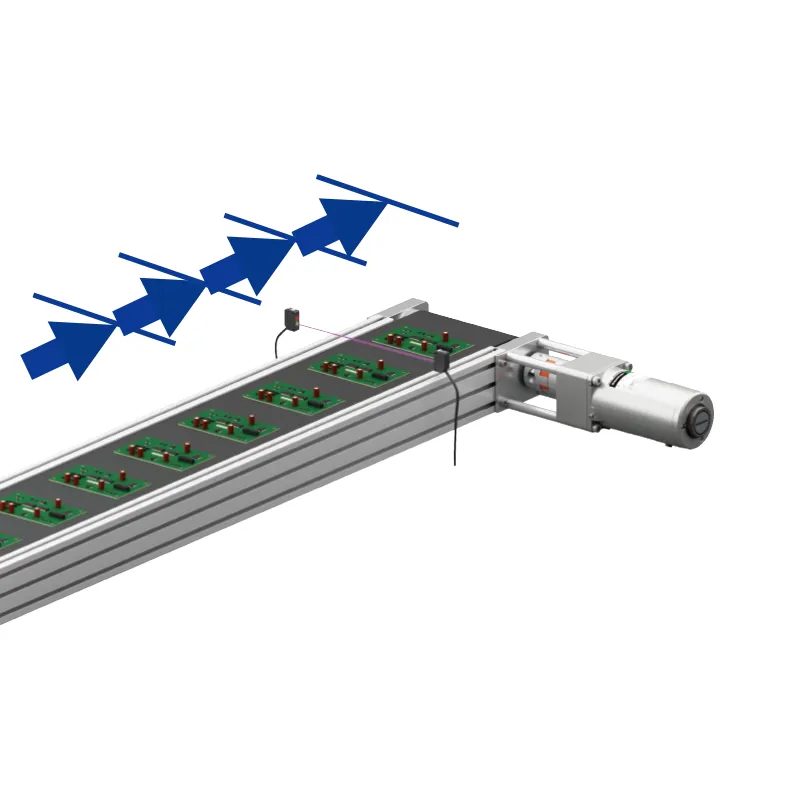
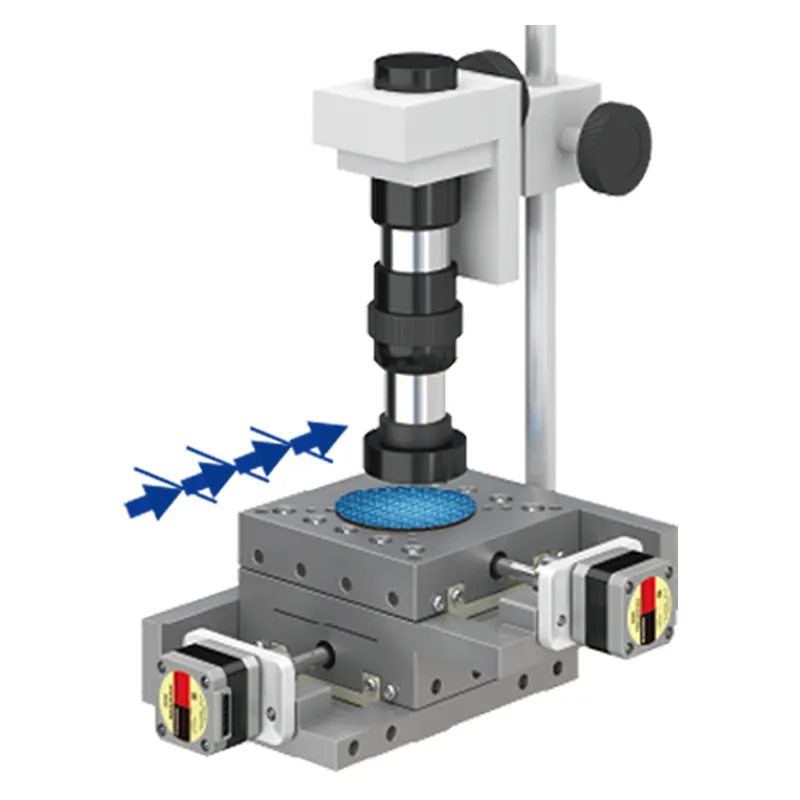
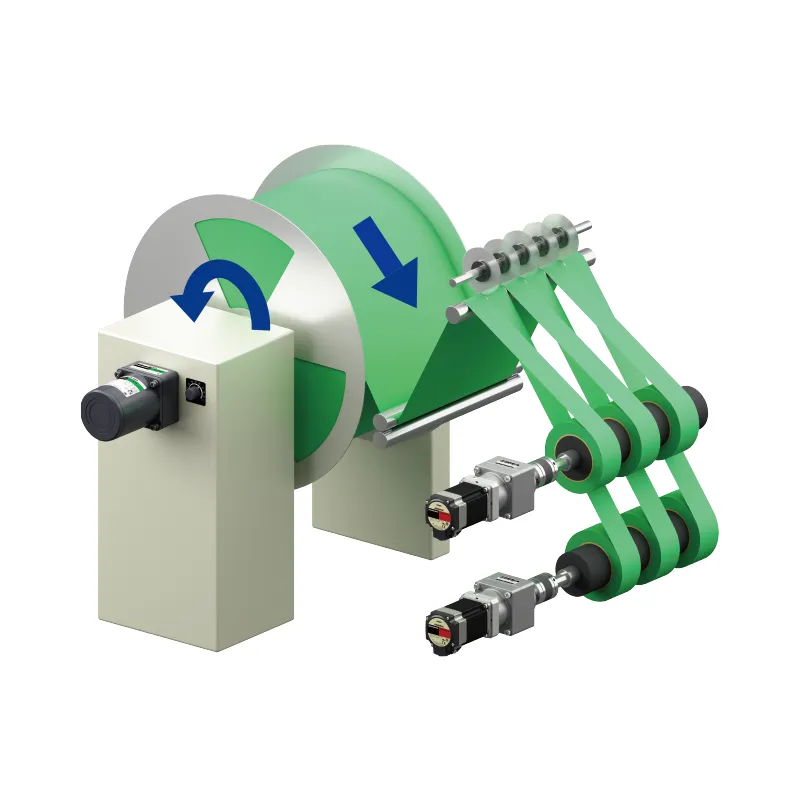
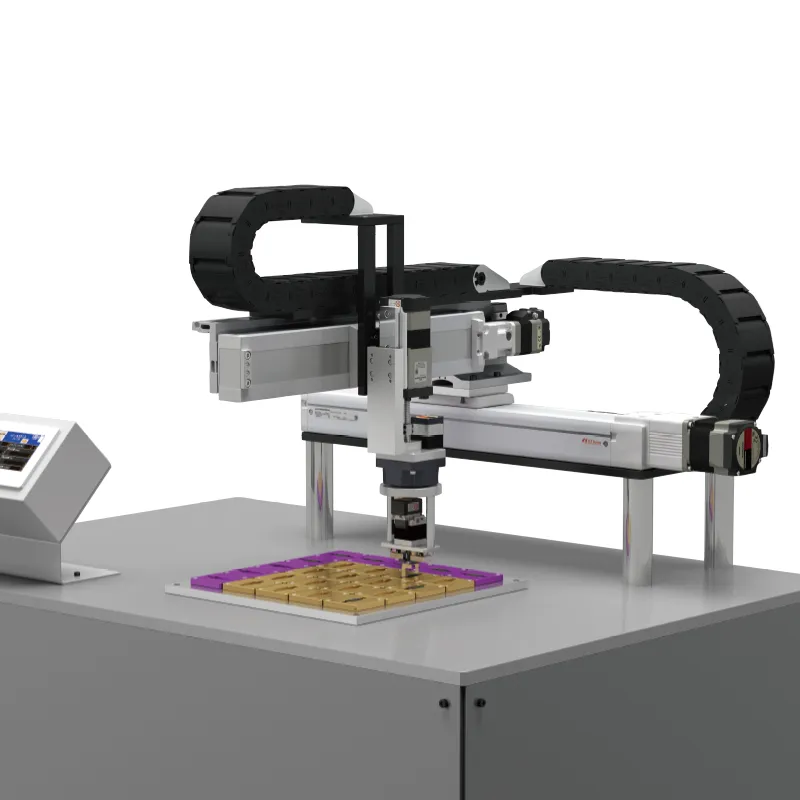
装置内製事例
当社で内製した装置の事例をご紹介します。これらはすべて実際の製造現場で使われています。


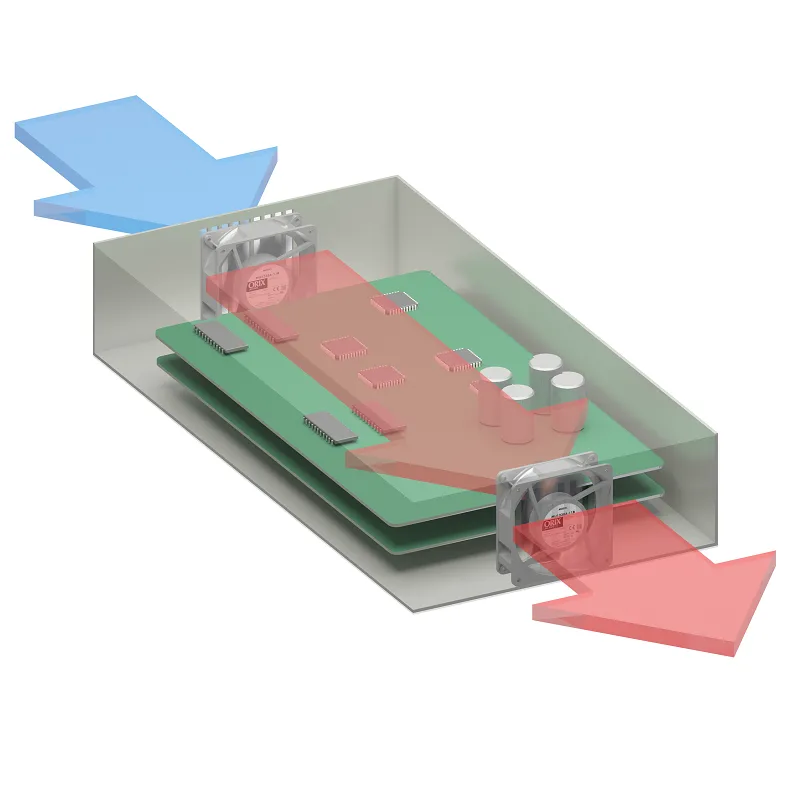
解決提案
装置の課題に対する具体的なソリューション事例や、当社製品の選び方・活用方法について、イラストや動画を用いてわかりやすくご紹介します。

ロボットで実現する自動化
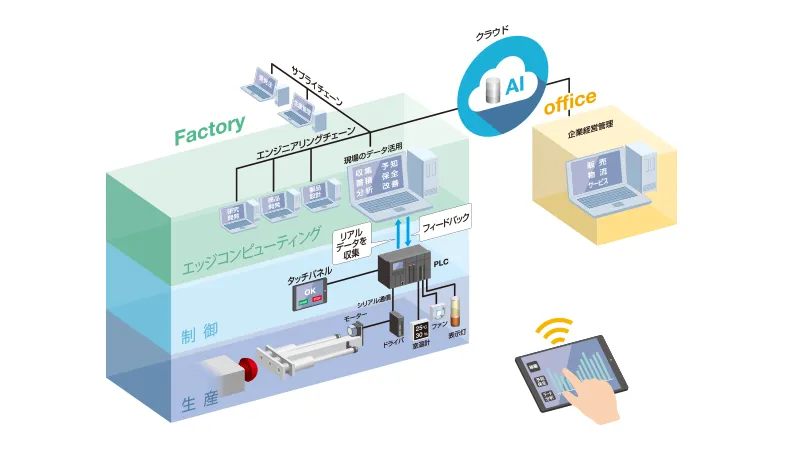
自動化を支援するオリエンタルモーターの最新動向

自動化を支援するオリエンタルモーターの最新動向
自動化に欠かせない産業用小型モーターを幅広く手掛けるオリエンタルモーター。お客様の課題に対してどのようにお応えしようとしているのか最新の動向をインタビュー記事などでご紹介します。
さらに詳しく
オリエンタルモーターの産業用ロボット・コントローラ

オリエンタルモーターの産業用ロボット・コントローラ
αSTEP AZシリーズを搭載したロボットを販売しています。垂直多関節、水平多関節ロボットなど多数ラインアップしています。
さらに詳しく

新着情報
新製品情報
小型ロボット OVR 5軸垂直多関節ロボット

小型ロボット OVR 5軸垂直多関節ロボット
小型ロボット OVR 5軸垂直多関節ロボットをリニューアルしました。可動範囲の拡大により、ワークへのアクセス性や、装置レイアウトの自由度が向上。さらに、実働20日の短納期出荷に対応し、装置立ち上げまでのリードタイム短縮に貢献します。
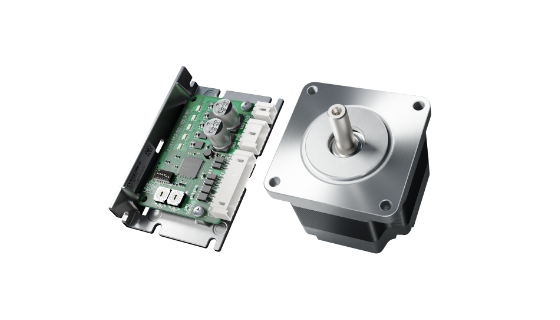
サーボモーター KXRシリーズ

サーボモーター KXRシリーズ
装置性能の向上を実現する、高い特性、機能を備えたサーボモーターを発売しました。ギヤヘッドやアクチュエータなどの周辺機器もラインアップし、高速ワーク搬送から高精度位置決めまで、様々な用途を実現します。
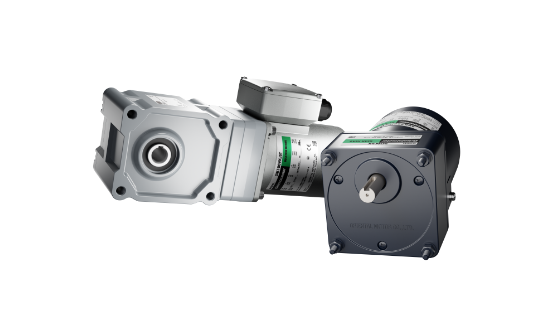
αSTEP AZシリーズ 標準タイプ 取付角寸法 28 mm 電磁ブレーキ付

αSTEP AZシリーズ 標準タイプ 取付角寸法 28 mm 電磁ブレーキ付
小型・軽量の取付角寸法28 mmに電磁ブレーキ付を新たにラインアップします。 限られたスペースでも負荷保持ができ、外部バッテリを使用せずに位置監視が可能です。