中空ロータリーアクチュエータ
DGⅡシリーズ

- 中空テーブルとクローズドループステッピングモーターを一体化
- サーボモーター搭載も用意
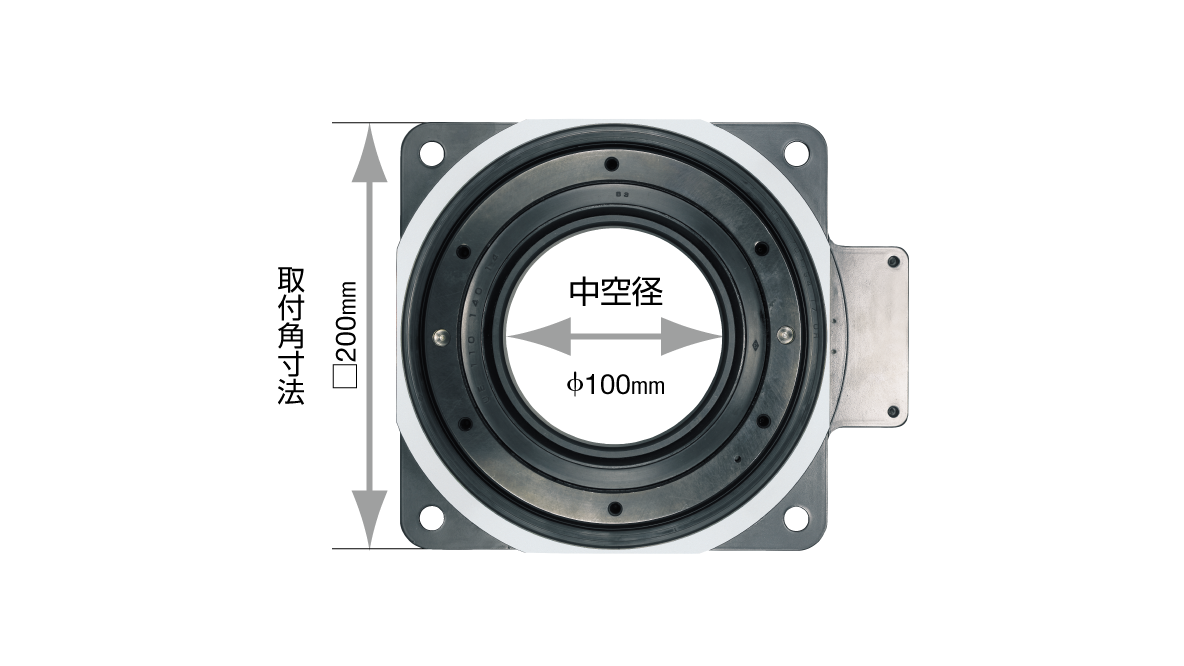
- 取付角60~200mm、中空径φ20~100mm
- 高強度・高精度位置決め
特徴 | 中空ロータリーアクチュエータ DGⅡシリーズ
クロスローラベアリング採用の中空テーブルとステッピングモーターを一体化した製品
中空ロータリーアクチュエータ DGⅡシリーズは、クロスローラーベアリングを採用した中空テーブルとステッピングモーターを一体化した製品です。アクチュエータ内部は減速機構造のため、高出力駆動が可能です。
中空ロータリーアクチュエータ DGⅡシリーズの特徴を動画でご覧いただけます。
負荷のダイレクト締結が可能
慣性モーメントの大きいテーブルやアームなどを直接取り付けることができるため、連結部品(カラー)が不要になり、設計や組付けの手間、部品コストの削減が図れます。
大口径中空出力テーブル
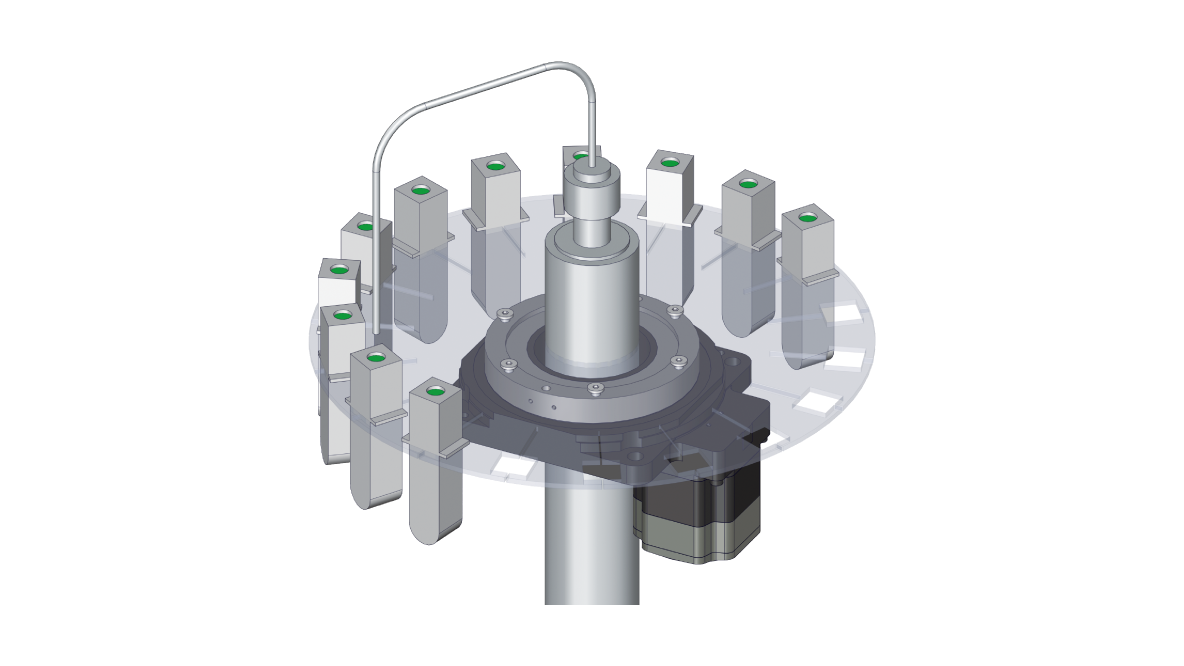
中空穴をケーブルの配線や、エアーや液体の配管に利用できます。
高強度
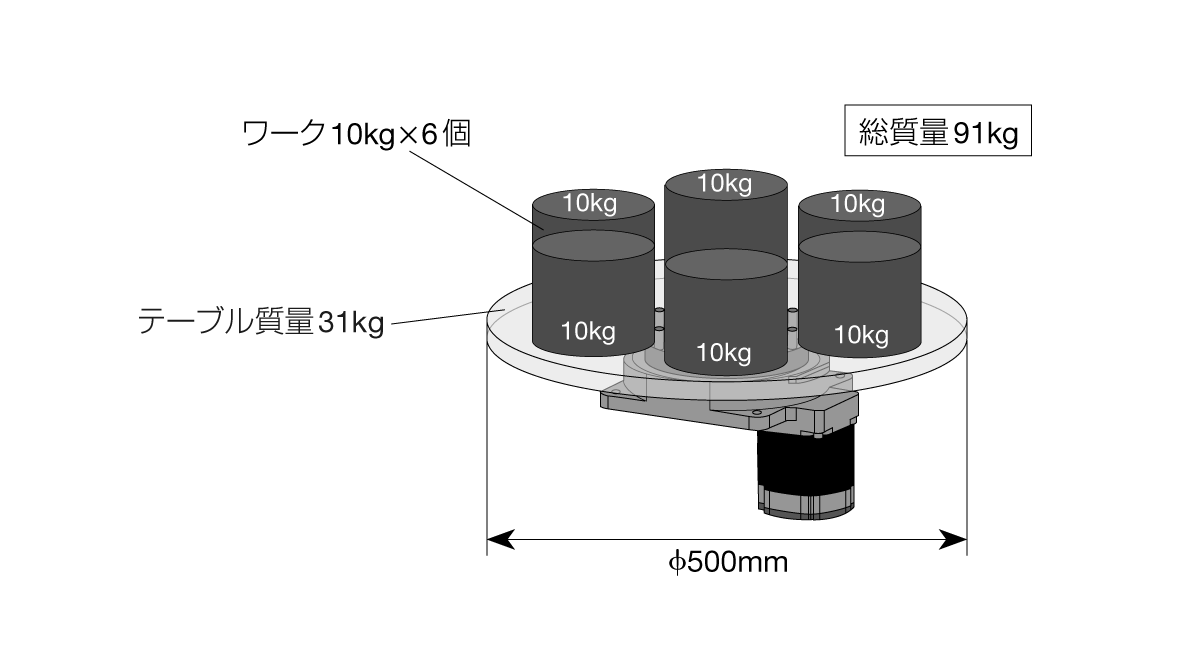
重くて大きいワークも駆動可能
最大許容アキシアル荷重が4000N。最大許容モーメントが500N・m。質量や慣性モーメントが大きなワークでも駆動できます。
変位量が小さい
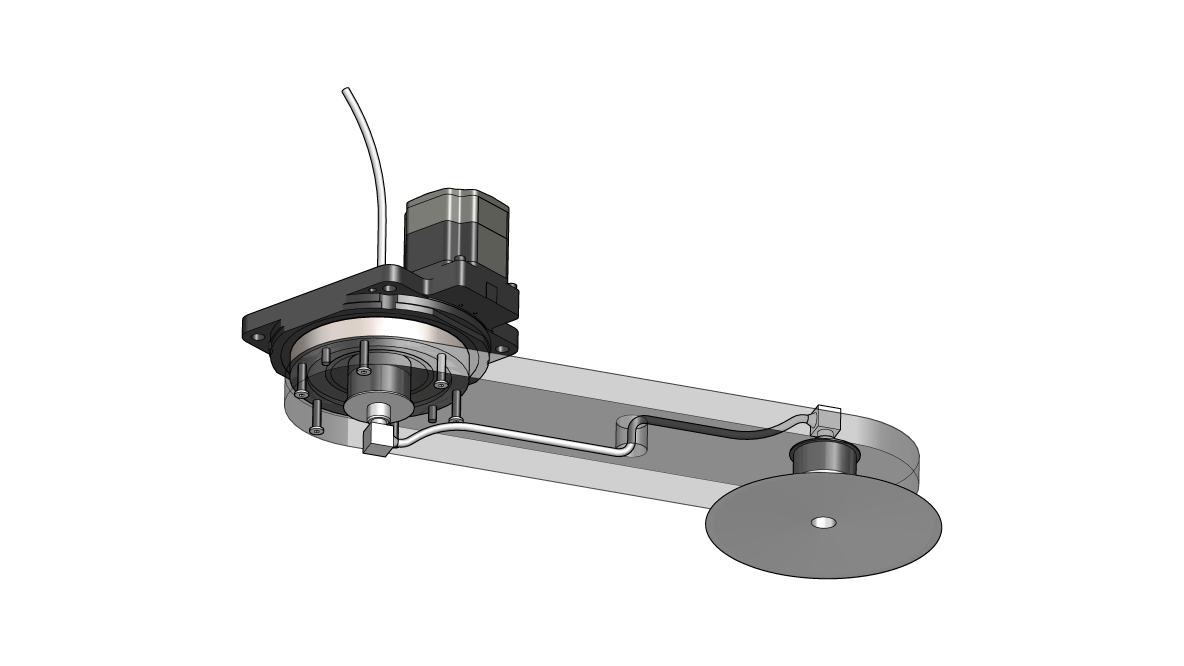
出力テーブル中央から離れた位置にワークを載せることができます。
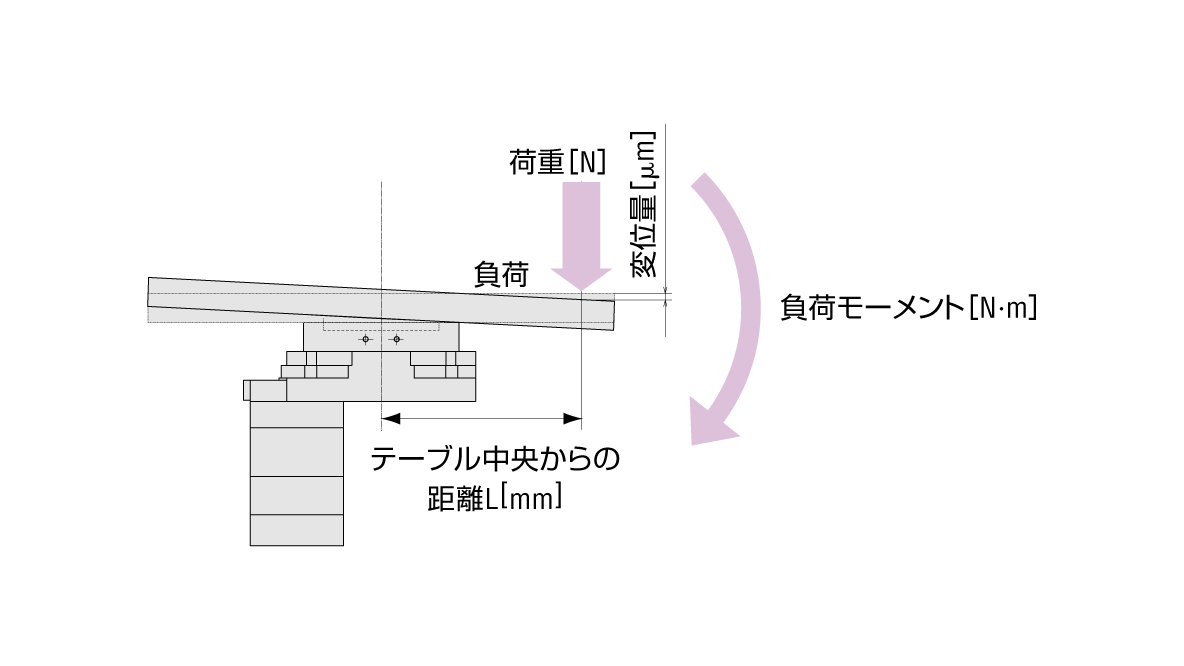


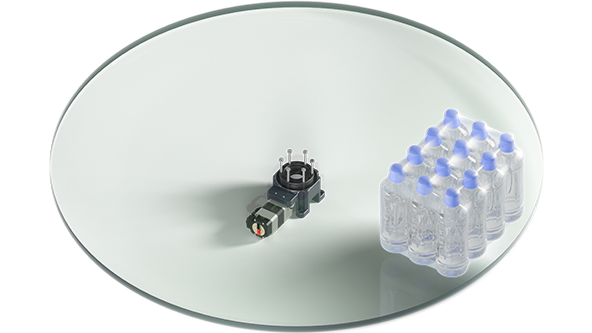
許容モーメントアップ。アーム長約3倍に延長可。可動範囲拡大に貢献
許容モーメントの値が上がったため、アーム長約3倍に延長可能。装置の可動範囲を大幅に拡張し、設計自由度を高めます。


| 仕様変更前 | 仕様変更後 | |
|---|---|---|
| 取付角寸法 [mm] | 130 | 130 |
| 許容モーメント [N·m] | 50 | 160 |
| 負荷モーメント [N·m]※ | 29.4 | 88.2 |
| 負荷の質量 [kg] | 6 | 6 |
| テーブル中心からの距離[m] | 0.5 | 1.5 |
| ペットボトル [本] | 12 | 12 |
- ※ 負荷モーメント [N·m] = 負荷の質量 [kg] × テーブル中心からの距離 [m] × 重力加速度 9.807 [m/s²]
許容モーメントアップ。1サイズ上の取付角寸法130 mmと同等の許容モーメント。装置の小型化に貢献
許容モーメントの値が上がったため、高い許容モーメントをコンパクトサイズで実現。装置の小型化に貢献します。

| 仕様変更前 | 仕様変更後 | |
|---|---|---|
| 取付角寸法 [mm] | 130 | 85 |
| 許容モーメント [N·m] | 50 | 50 |
| 負荷モーメント [N·m]※ | 29.4 | 29.4 |
| 負荷の質量 [kg] | 6 | 6 |
| テーブル中心からの距離[m] | 0.5 | 0.5 |
| ペットボトル [本] | 12 | 12 |
- ※ 負荷モーメント [N·m] = 負荷の質量 [kg] × テーブル中心からの距離 [m] × 重力加速度 9.807 [m/s²]
高い位置決め精度
| モーター縦方向 | モーター横方向 | モーター横方向(脚取付) | |
|---|---|---|---|
| バックラッシ | ノンバックラッシ | 3〜10 arcmin | 6 arcmin |
| 繰り返し位置決め精度 | ±15 arcsec (±0.004°) | ±15 arcsec (±0.004°) | ±30 arcsec (±0.008°) |
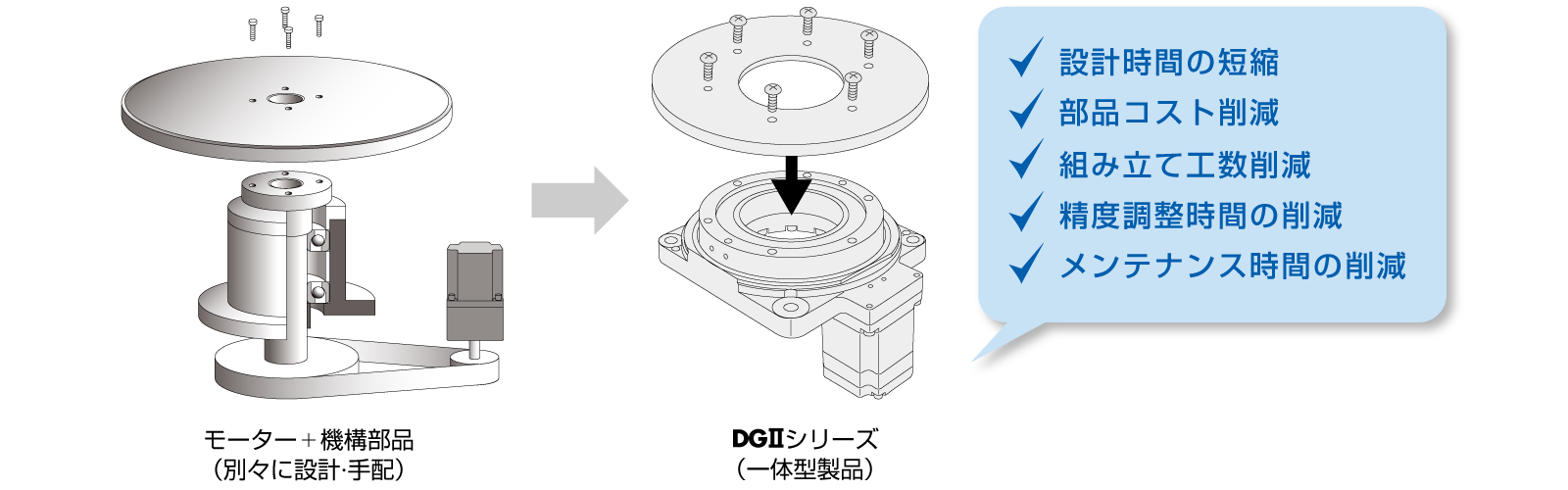
装置の立ち上げ時間を短縮する一体型構造
「設計」「組み立て」「調整」にかかる時間を削減
出力テーブルには、装置のテーブルやアームを直接取り付けることができます。
クロスローラベアリングの採用で高出力駆動
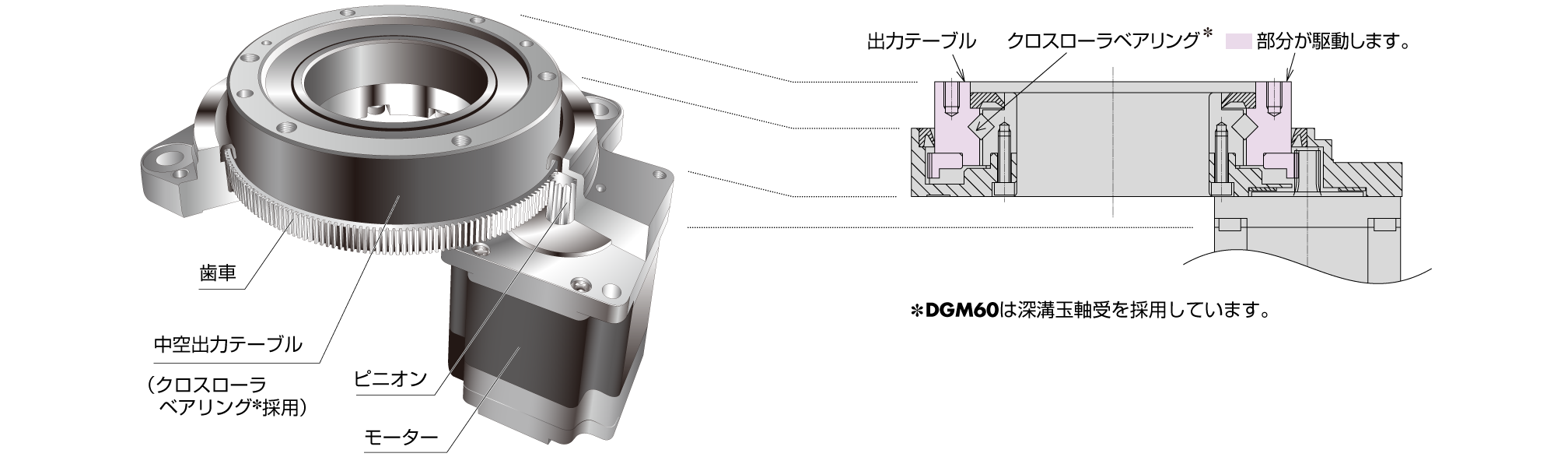
- 上図はモーター縦方向の構造です。中空出力テーブルの構造については、モーター横方向も同様です。
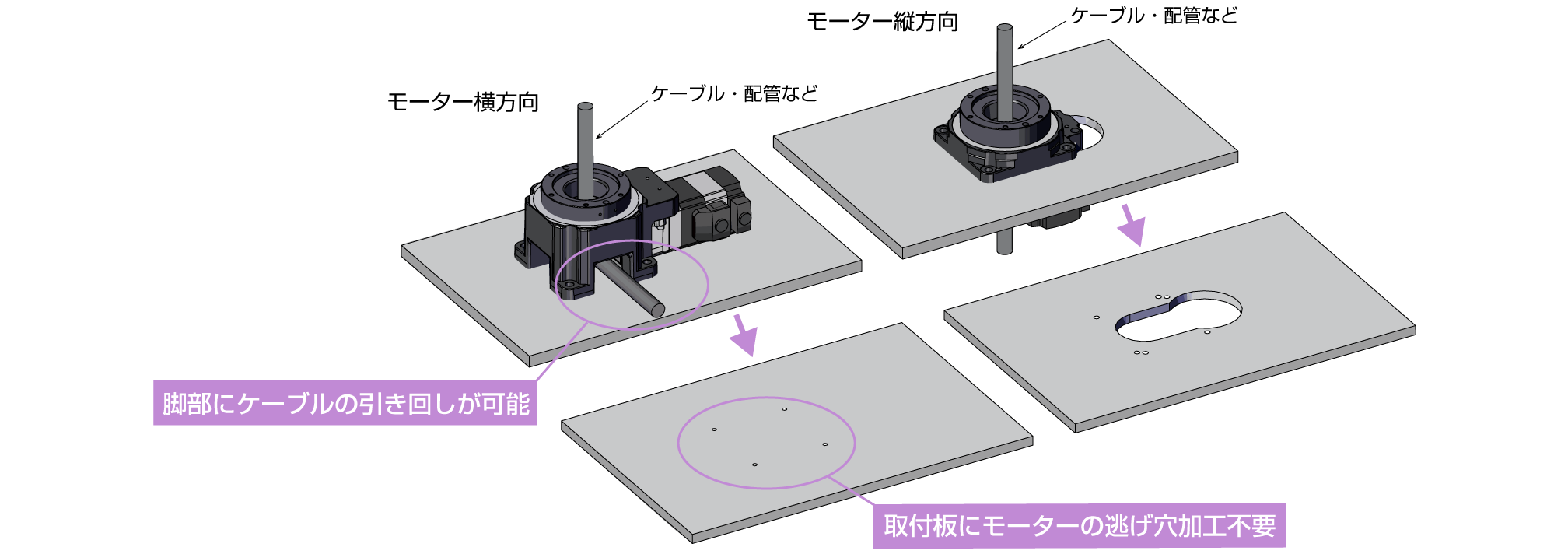
スペースに合わせて選べるモーター方向
- モーター縦方向、モーター横方向、モーター横方向(脚取付)をご用意しています。 装置内の設置スペースに合わせてお選びいただけます。
- モーター横方向は薄型のため、取付面からの高さを抑えることができます。またコネクタタイプ※のモーターのため、接続が簡単です。
- ※ DC電源入力 取付角60mmはケーブルタイプのモーターです。

モーター横方向(脚取付)のメリット
- モーターの逃げ穴加工が不要なため、取付板が簡略化できます。
- テーブル下の脚部の間からケーブル・配管等の引き回しが可能です。
選べる取付方向
DGⅡシリーズは、水平取付はもちろん、天井や壁掛取付も可能ですので、装置設計の幅が広がります。

αSTEP AZシリーズ搭載のメリット
バッテリレスのアブソリュートセンサを搭載
小型のバッテリレスの機械式アブソリュートセンサ(ABZOセンサ)を搭載しています。生産性の向上やコスト削減に貢献します。
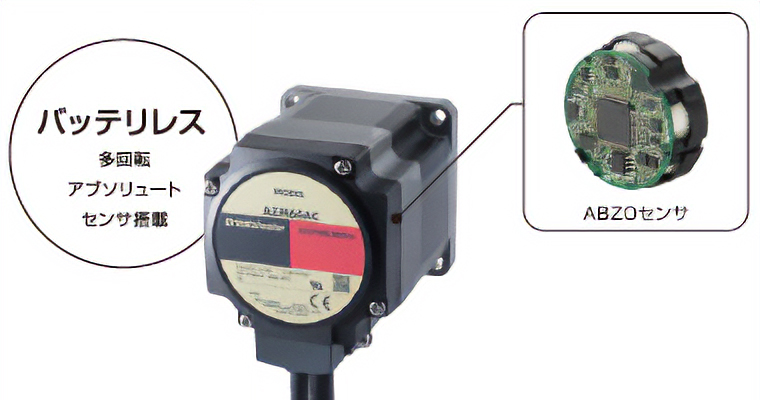
- 機械式センサ
非通電時も位置情報を保持 - 多回転アブソリュートセンサ
基準となる原点から、モーター軸で±900回転(1800回転分)の絶対位置が検出可能
外部センサ不要
アブソリュートシステムなので、原点センサ、リミットセンサは不要です。
メリット
- 高速原点復帰+原点復帰精度の向上
- コストダウン
- 省配線
- 外部センサ誤動作の影響を受けない
バッテリレス
機械式センサはバッテリが不要です。
位置情報はABZOセンサで機械的に管理されています。
メリット
- バッテリの交換が不要
- 自由なドライバの設置
- 海外輸送も安心
シーケンス機能によりメインプログラムを簡略化
AZシリーズは、連結運転や運転間のタイマ設定、条件分岐、ループ運転などの豊富なシーケンス機能を搭載しています。(一部機種を除く)
サポートソフトMEXE02を使って設定することができ、上位システムのシーケンスプログラムを簡略化できます。
- 位置決め運転データ設定値(最大256点)
- 汎用入出力点数(入力10点、出力6点)
- 通信用入出力点数(入力16点、出力16点)
便利な運転・設定
AZシリーズの機能を使うと、下記運転が可能です。
近回り運転でタクトタイム短縮
設定した目標位置に向かって、最短距離で移動します。
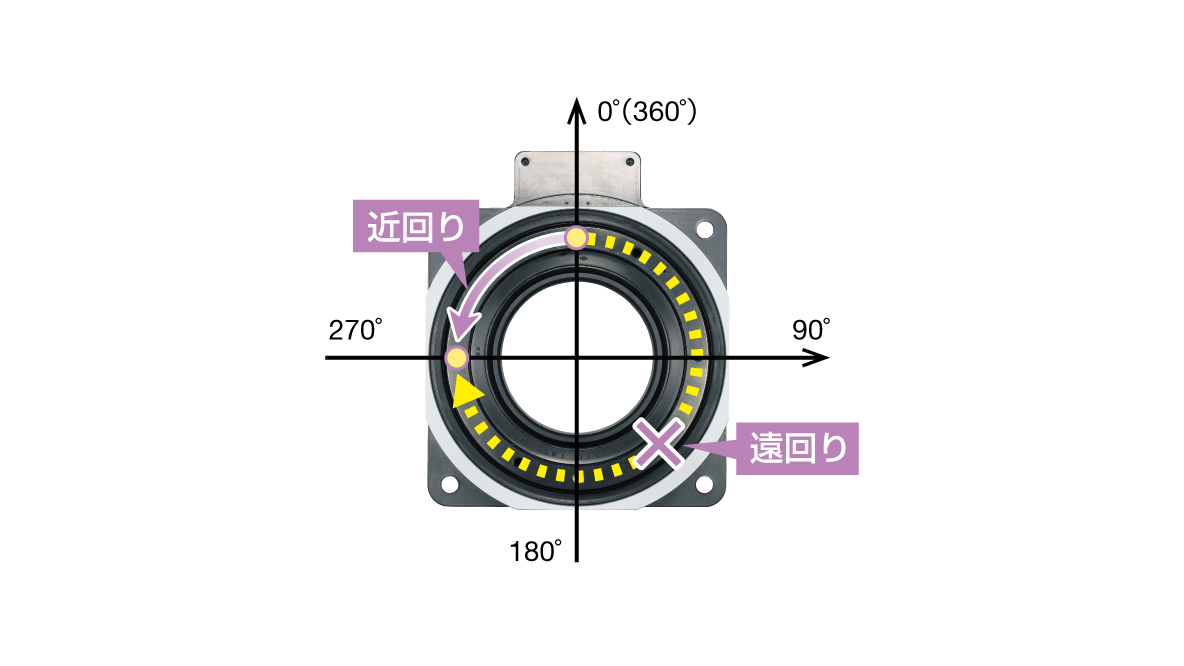
例)
0°の位置から270°に移動する場合、反時計回りの最短の回転方向を自動的に選択して駆動します。
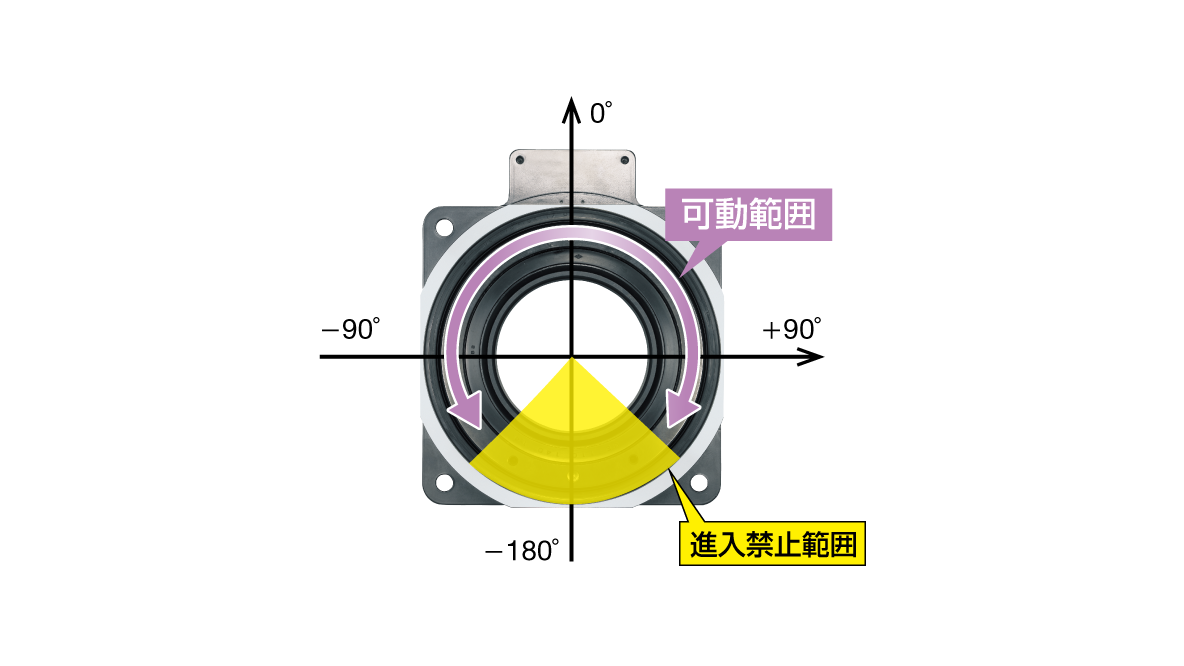
進入禁止範囲を設定
障害物との衝突による装置の破損防止と作業エリアを確保します。
無限多回転が可能
現在位置を自動的に「0°」にリセットできる、ラウンド機能を搭載しています。無限多回転の運転が可能になります。
装置立ち上げ時間の短縮
中空ロータリーアクチュエータを運転する際に必要なパラメータが、出荷時に設定されています。装置立ち上げ時間短縮に貢献します。
[出荷時に設定されているパラメータの例]
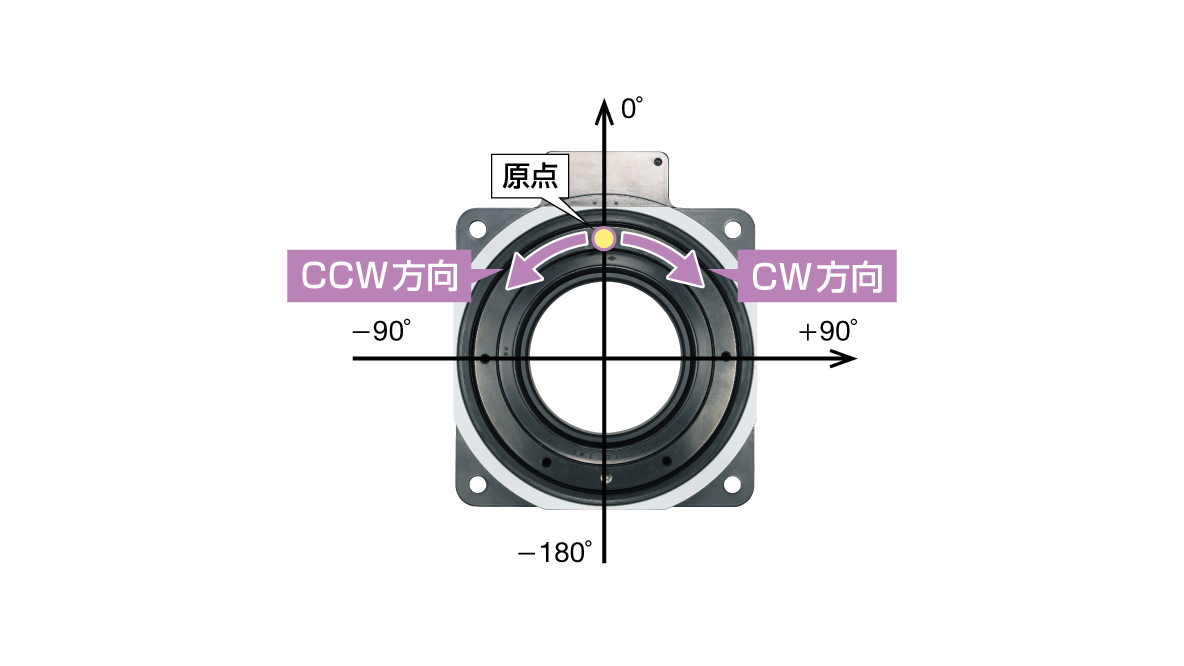
- 原点位置
- 分解能(0.01°/step)
- 出力テーブルの回転方向設定
- ラウンド機能設定(±180°)
- ※ 各初期設定値は変更可能です。
上位システムに合わせて選べるドライバ
さまざまな制御・システム・インターフェイスに対応可能なラインアップを用意しています。
| ドライバタイプ | 対応インターフェイス | 単軸ドライバ | ||
|---|---|---|---|---|
| AC電源入力 | DC電源入力 | |||

AZシリーズ搭載 |

AZシリーズ搭載 |
|||
| ネットワーク対応 | FAネットワークを通じて、上位制御機 器からドライバを直接制御 |
EtherCAT | ○ | ○ |
| EtherNet/IP™ | ○ | ○ | ||
| PROFINET | ○ | ○ | ||
| MECHATROLINK-Ⅲ | ○ | - | ||
| SSCNETⅢ/H | ○ | - | ||
| 位置決め機能内蔵 | 運転データをドライバに内蔵。 Modbus(RTU)とI/Oで制御可能。ネット ワークコンバータを使うことでCC-Link 制御が可能。 |
Modbus(RTU) I/O CC-Link※ |
○ | ○ |
| RS-485通信付きパルス列入力 | パルス信号で制御。モーターのステー タス情報をModbus(RTU)でモニタ可 能。 |
パルス列 Modbus(RTU) |
○ | ○ |
| パルス列入力 | パルス信号で制御 | パルス列 | ○ | ○ |
- ※ 別売のネットワークコンバータ使用時に対応可能です。
AZシリーズを搭載したラインアップ
搭載モーターが同じため、駆動方法やメンテナンス方法が共通です。
電動アクチュエータ(AZシリーズ搭載)
| 電動スライダ | 電動シリンダ | コンパクト電動シリンダ | ラック・ピニオンシステム | 電動グリッパ | 中空ロータリーアクチュエータ |
|---|---|---|---|---|---|
| EZSシリーズ | EACシリーズ | DRシリーズ DRS2シリーズ |
Lシリーズ | EHシリーズ | DGⅡシリーズ |
- 搭載モーターの電源入力はシリーズで異なります。詳細ラインアップは各シリーズのページでご確認ください。
サポートソフト、モニタ機能
サポートソフト MEXE02でパソコンから簡単駆動
サポートソフト MEXE02を使用することにより、運転データや各種パラメータの設定・編集がおこなえるほか、ティーチング、各種状態のモニタをおこなうことができます。
さまざまな機能で、立上げからメンテナンスまでを総合サポート
-
立ち上げ・評価
配線チェックやテスト運転時に役立つ機能をご用意しています。
- 運転データの設定と保存
- I/Oモニタ
- ティーチング・リモート運転
-
調整
装置設置後のモーター動作の調整に役立つ機能をご用意しています。
- 波形モニタ
-
診断・メンテナンス
運用開始後のトラブル時の診断やメンテナンスに役立つ機能をご用意しています。
- アラームモニタ
- ユニット情報モニタ
- ステータスモニタ
-
運転データ/パラメータ設定画面 -
波形モニタ
協働ロボットの周辺機器として、連動して動かすことが可能
ロボット周辺軸の旋回用途として、ご利用いただけます。
組み合わせ製品(ユニバーサルロボット・FANUC共通)
-
- 中空ロータリーアクチュエータ
- DGⅡシリーズ AZシリーズ搭載 (DC電源入力)
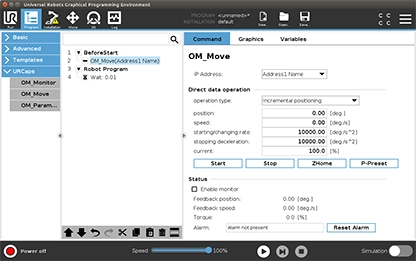
ユニバーサルロボット認証アプリケーション

URCapから直接制御が可能
DGⅡシリーズ専用のURCap※1で、ユニバーサルロボットとDGⅡシリーズを連動させた制御が可能です。ユニバーサルロボットのティーチングペンダントから移動量や速度などの設定・変更ができます。
ユニバーサルロボット製品仕様
-
- URCap
- OM_DG2-x.x.x.urcap※2
-
- 対応シリーズ
- e-Series
-
- PolyScopeバージョン
- PolyScope 5.12.2以上
URCap、セットアップマニュアルをご用意しています。
URCap
セットアップマニュアル
- ※1 URCapは、ユニバーサルロボットのグラフィカルプログラミングインターフェースです。
- ※2 x.x.x.にバージョン情報が入ります。
ファナックプラグイン対応周辺機器

タブレットTPから直接制御可能
DGⅡシリーズ専用のプラグインソフトで、CRXシリーズとDGⅡシリーズを連動させた制御が可能です。PLCなどの外部制御機器は必要なく、ファナックのタブレットTPで移動量や速度などを設定・変更できます。

ファナック製品仕様
-
- プラグインソフト
- ORIENTALMOTOR_AZ.ipl
-
- 対応シリーズ
- CRXシリーズ
ソフトウェアオプション「ユーザソケットメッセージ機能(A05B-2600-R648)」が必要です。
プラグインソフト、セットアップマニュアルをご用意しています。
プラグインソフト
セットアップマニュアル
ご注意
ユニバーサルロボットやファナック製品に関するお問い合わせは、当社サポート対象外です。
用途例・使用例
低速・低振動用途
マイクロステップ駆動方式とスムースドライブ機能により、低速域でも低振動で回転動作ができます。
例) 液剤塗布装置
低速でもムラのない安定した塗布が可能です。
高精度位置決め用途
停止時に軸が微小に動くハンチングと呼ばれる現象を起こしません。停止時に振動すると困る用途に最適です。
例) 画像検査装置
ハンチングしないため、正確な画像が取り込めます。
関連製品
DGIIシリーズ モーターレスタイプ
DG IIシリーズのアクチュエータ単体(モーターレスタイプ)です。DGII シリーズのアクチュエータ構造はそのままに、カップリング接続で各社サーボモーターと組み合わせて使用します。大慣性駆動の用途に適しています。
製品詳細はこちら
DGN130R2-18
DGN200R2-18

AZシリーズ miniドライバ DC電源入力
ボックス型のドライバより、さらに小型・軽量に設計されたminiドライバです。バッテリ電源にも対応し、今まで以上にさまざまな用途でご活用いただけます。

AZシリーズ 多軸ドライバ DC電源入力
当社のAZシリーズDC電源入力のモーターと、それらを搭載している電動アクチュエータを接続できます。

-

2軸タイプ -

3軸タイプ -

4軸タイプ -

スリムタイプ
(4軸)
製品を絞り込む

