ロボットの内製・導入を幅広くサポート
ロボットを導入するにあたって、「ロボットを自社で内製したい」「市販品は機能的にオーバースペック」
「内製しようにもモーターの選定方法がわからない」といった設計の悩み・不安はありませんか。
このページでは、実際に作ったデモ機をもとにポイントをご紹介いたします。
併せて、ロボットの内製を検討のお客様向けて関連サービスをご紹介します。
ご検討の際はお気軽にご相談ください。
垂直多関節ロボット デモ機
デモ機概要
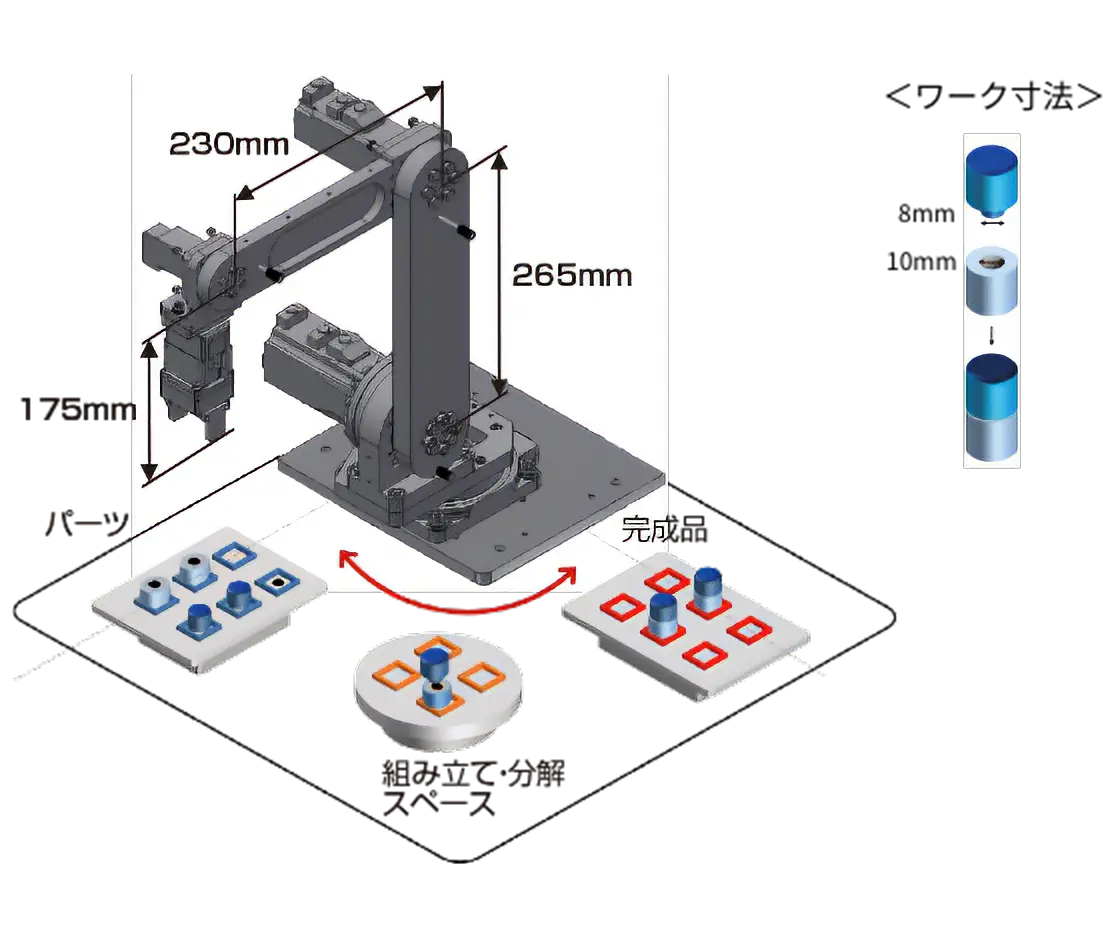
部品組み立て工程を模した垂直多関節ロボットのデモ機です。
2つのパーツを組立スペースにピックアンドプレイスして組立て、完成品を完成スペースへ移載します。
| 軸数 | 5軸 |
|---|---|
| 設置方法 | 床置き |
| アーム長 | 653mm |
| ワーク質量 | 300g |
| 主電源 | AC100V * |
| 質量 | 30kg |
- ※ ドライバの駆動用・制御用電源はDC24Vです。
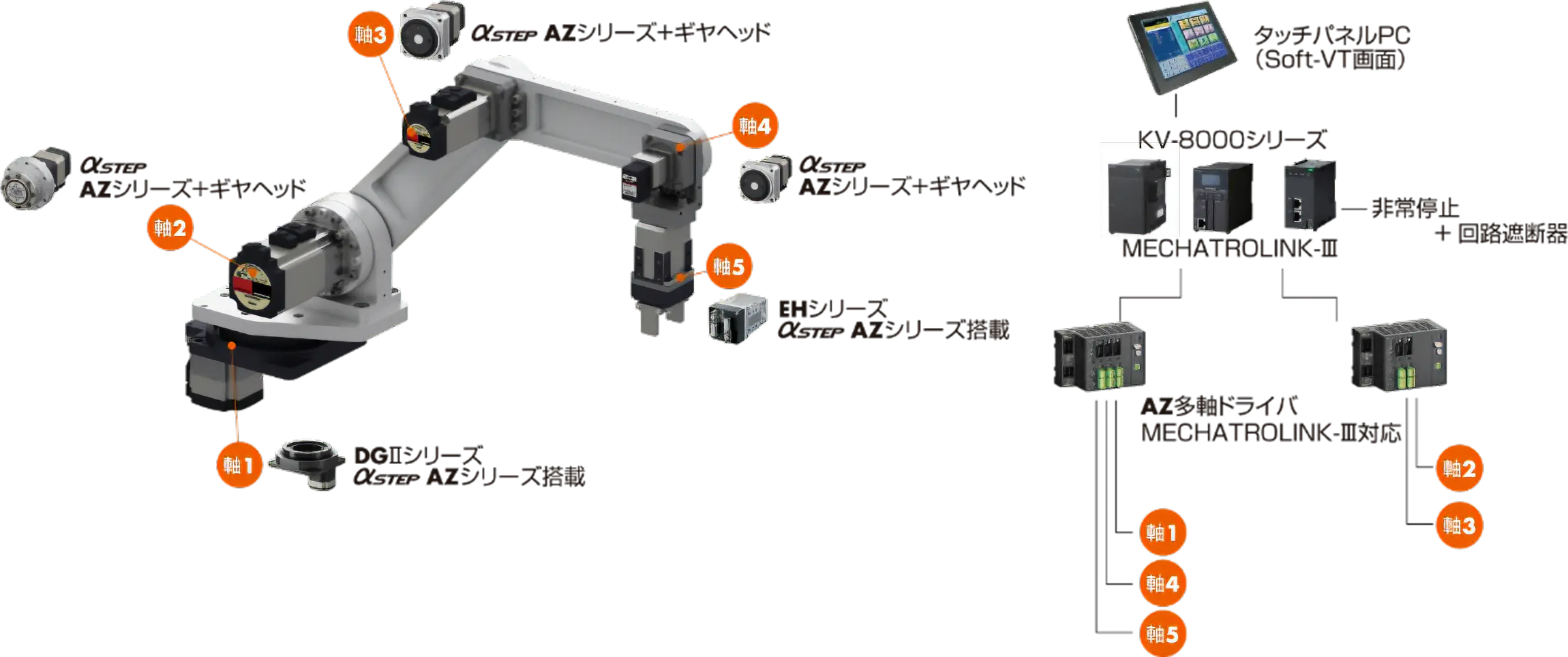
システム構成
各軸をMECHATROLINK-Ⅲにて同期制御しています。
座標指定はPLCのファンクション・ブロックを使っています。
AZシリーズで自作したロボットをかんたんに、
設定・プログラムして動かせるロボットコントローラもご用意しております。

- ※ 今回のデモ機にMRC01は使用しておりません。
構成品一覧
モーター・電動アクチュエータ
| 軸 | 品名 | 定価 | |
|---|---|---|---|
|
軸1 
|
中空ロータリーアクチュエータ | DGM130R-AZAK | 211,800円 |
| 可動接続ケーブル*1 | CC020VZRA | 10,100円 | |
|
軸2 
|
モーター | AZM66MK | 60,500円 |
| ギヤヘッド |
CSG-20-100-2UH-LW-SP-B
|
*3 | |
| 可動接続ケーブルセット 電磁ブレーキ付モーター用*2 |
CC030VZRBA | 15,300円 | |
|
軸3 
|
モーター | AZM46MK | 49,900円 |
| ギヤヘッド |
CSF-11-100-2UP-SP-C
|
*3 | |
| 可動接続ケーブルセット 電磁ブレーキ付モーター用*2 |
CC030VZRBA | 15,300円 | |
|
軸4 
|
モーター | AZM24AK | 30,300円 |
| ギヤヘッド |
CCSF-8-100-2UP-SP-A
|
*3 | |
| 可動接続ケーブル*2 | CC030VZ2RA | 11,200円 | |
|
軸5 
|
電動グリッパ | EH4-AZAKH | 79,900円 |
| 可動接続ケーブル*1 | CC030VZ2RA | 11,200円 | |
- *1
- 長さは2mです。
- *2
- 長さは3mです
- *3
- お問い合わせください。
ドライバ 
| 軸 | 品名 | 定価 | ||
|---|---|---|---|---|
|
軸1 軸4 軸5 |

|
多軸ドライバ 軸数3軸 | AZD3A-KM3 | 128,300円 |
| 主電源用ケーブル | LC03D06A | 1,800円 | ||
| 制御電源用ケーブル | LC02D06A | 1,600円 | ||
|
軸2 軸3 |

|
多軸ドライバ 軸数2軸 | AZD2A-KM3 | 96,800円 |
| 主電源用ケーブル | LC03D06A | 1,800円 | ||
| 制御電源用ケーブル | LC02D06A | 1,600円 | ||
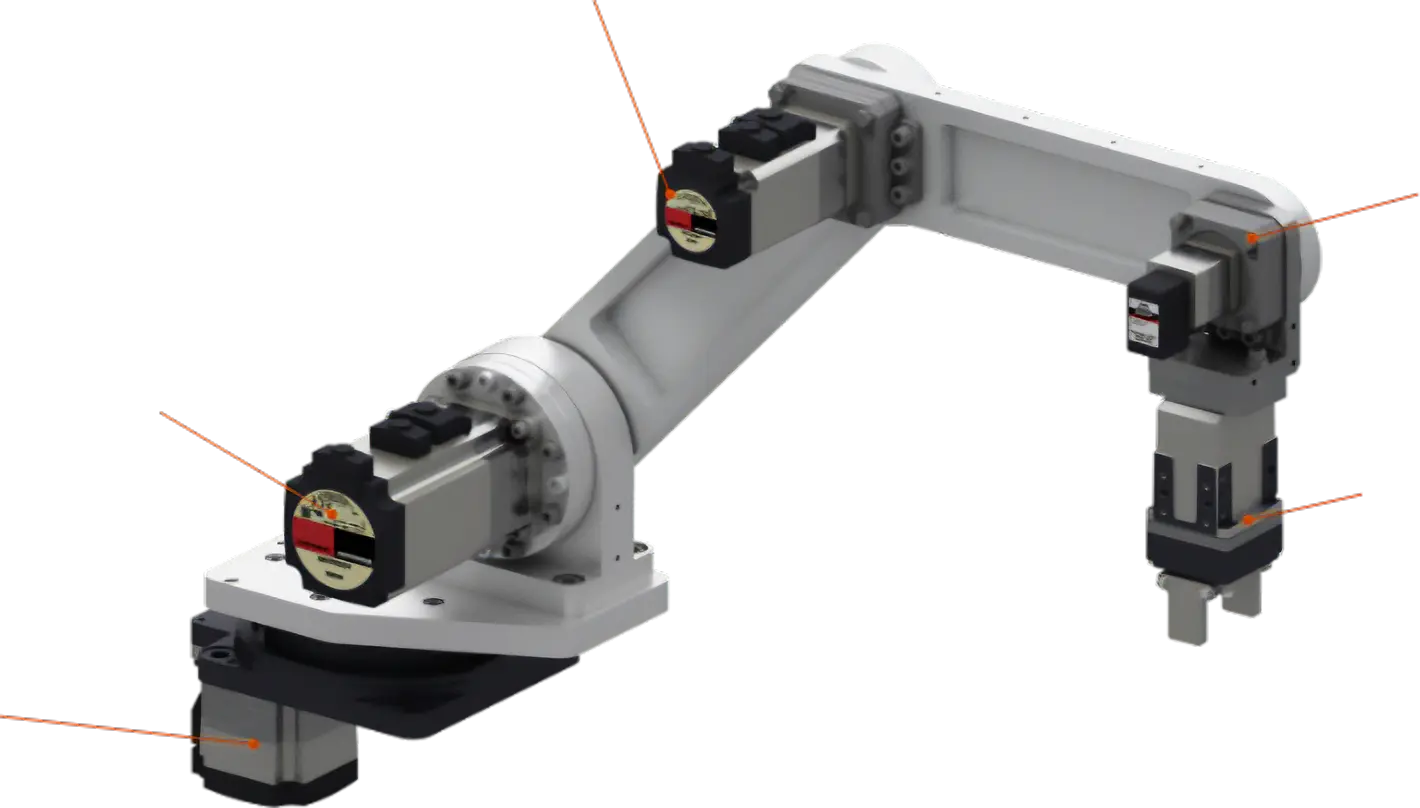
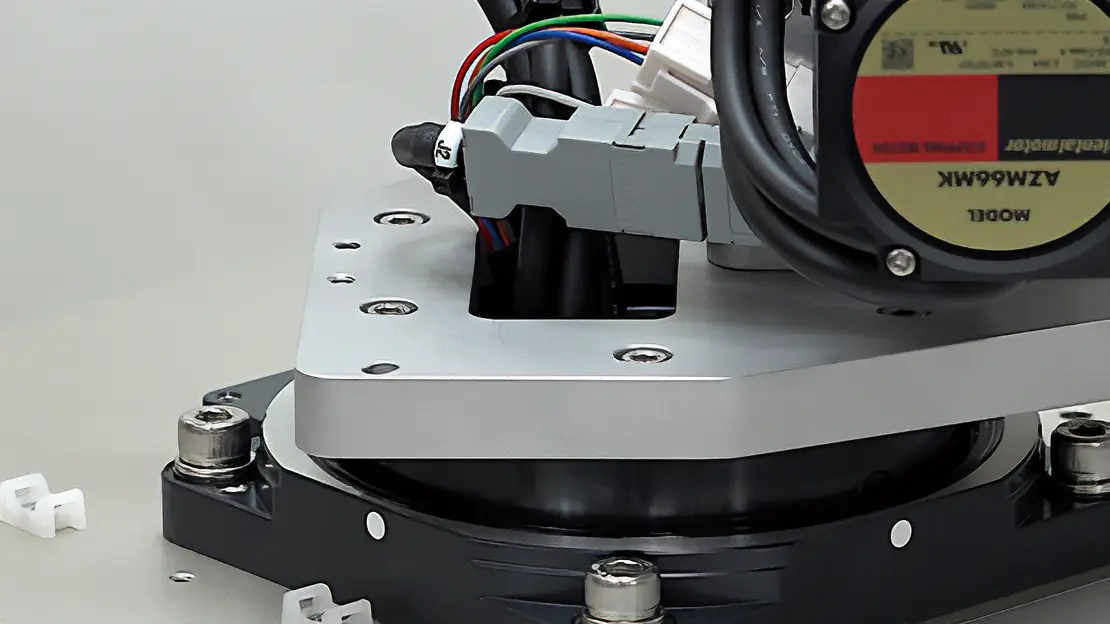
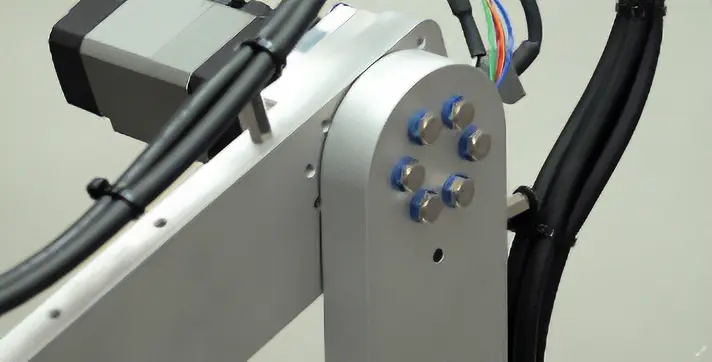
軸① - アーム旋回軸
<高荷重・高剛性>中空ロータリーアクチュエータ DGⅡシリーズ
様々なアームの姿勢により増大する負荷モーメントに耐えるため、
高荷重・高剛性のテーブルを採用
垂直多関節ロボットは、軸①から離れたワークをつかむ際、大きな負荷モーメントが発生します。
DGⅡシリーズは中空出力テーブルの軸受にクロスローラーベアリングを採用し、高許容モーメントを実現しました。
これによりアームをより長く伸ばせるため、ロボットの可動域拡大に貢献します。
動力ケーブルの配線を簡略化
ロボットに搭載された動力のケーブルは、アームの根元に集約されます。大口径の中空穴(貫通)は、引き回しが複雑な配線・配管を利用することができ、装置設計の簡略化が図れます。
搭載機器

中空ロータリーアクチュエータ
DGⅡシリーズ
中空ロータリーテーブルとαSTEPの一体型製品です。アクチュエータ内部は減速機構のため、高出力駆動が可能です。
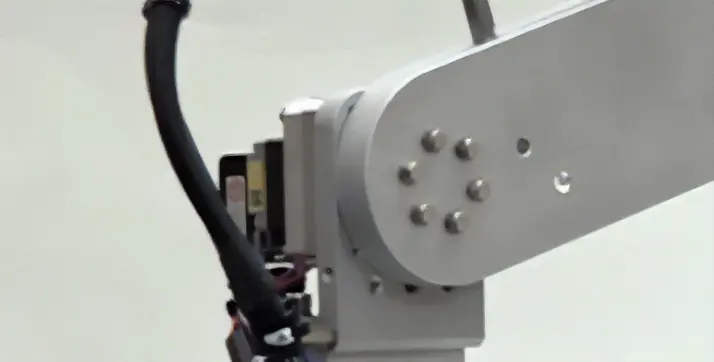
軸② - 関節軸
<軽量・高剛性、ノンバックラッシ>
ギヤヘッド CSGシリーズユニットタイプ軽量タイプ
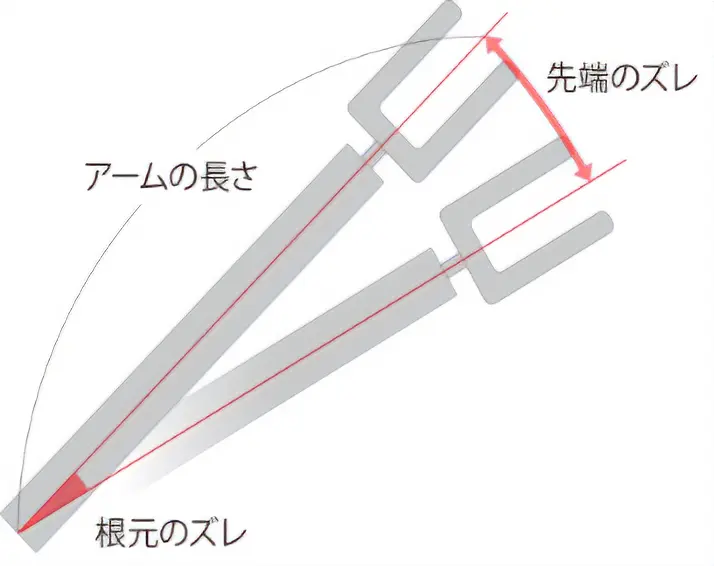
アーム先端のズレを抑え、高精度な動きを実現
軸①に近い関節では小さなズレでも、アーム先端では大きくなり、ワークを正確につかむことができない場合があります。
CSGシリーズはノンバックラッシのギヤのため、ズレを抑え、正確な動作を実現します。
関節軸を軽くして設計の自由度を拡大
各関節軸を軽量化することによって慣性モーメントが小さくなり、機構部品のスペック(トルクや剛性)を抑えることができます。
CSGシリーズは軽量であると同時に高剛性で負荷の直接取付が可能です。
締結部品が不要なので、アームを軽量化し、設計の自由拡大に貢献します。

搭載機器

CSGシリーズ ユニットタイプ 軽量タイプ
詳細については、最寄りの営業所へお問い合わせください。
軸③・軸④ - 関節軸
<超扁平・高剛性、ノンバックラッシ>
ギヤヘッド CSF miniシリーズ 2UPタイプ
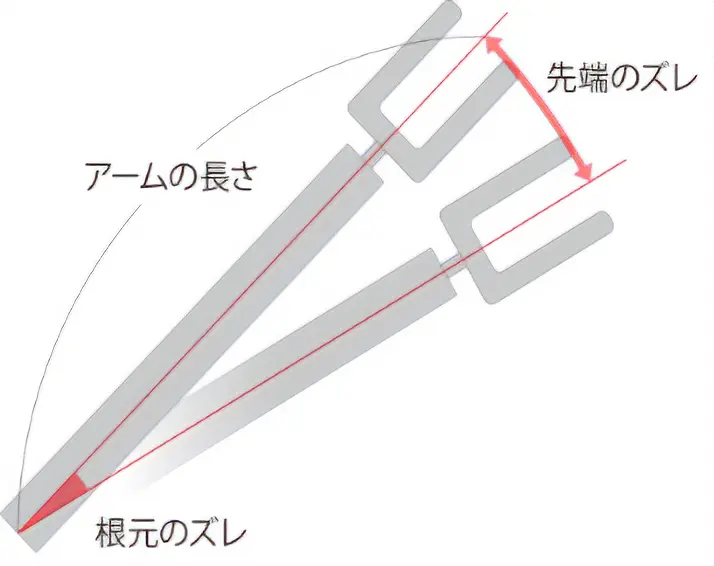
アーム先端のズレを抑え、高精度な動きを実現
軸①に近い関節では小さなズレでも、アーム先端では大きくなり、ワークを正確につかむことができない場合があります。
CSF miniシリーズはノンバックラッシのギヤのため、ズレを抑え、正確な動作を実現します。
関節軸を軽くして設計の自由度を拡大
各関節軸を軽量化することによって慣性モーメントが小さくなり、機構部品のスペック(トルクや剛性)を抑えることができます。
CSF miniシリーズは軽量であると同時に高剛性で負荷の直接取付が可能です。
締結部品が不要なので、アームを軽量化し、設計の自由拡大に貢献します。
-
< 軸③ > -
< 軸④ >
搭載機器

CSF miniシリーズ 2UPタイプ
詳細については、最寄りの営業所へお問い合わせください。
軸⑤ - エンドエフェクタ
<小型・軽量>電動グリッパ EHシリーズ
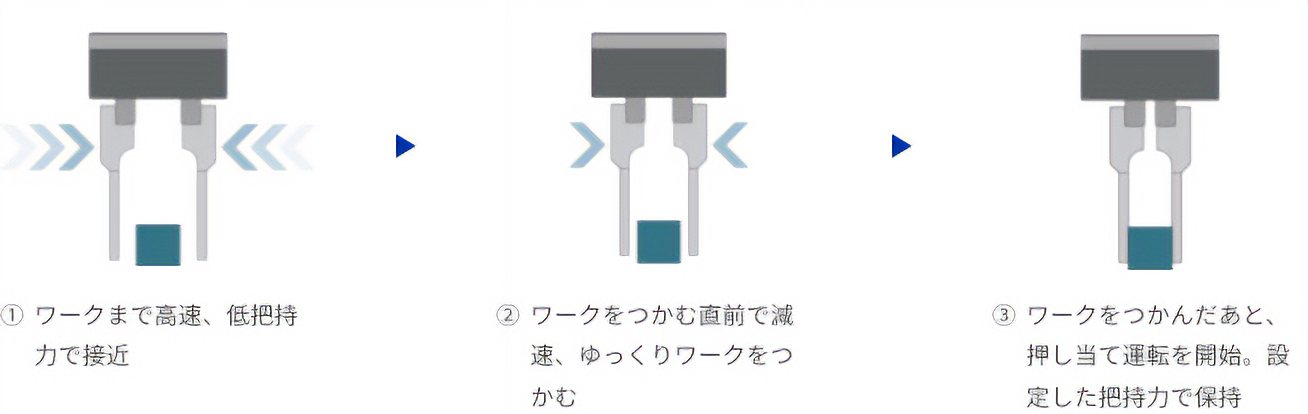
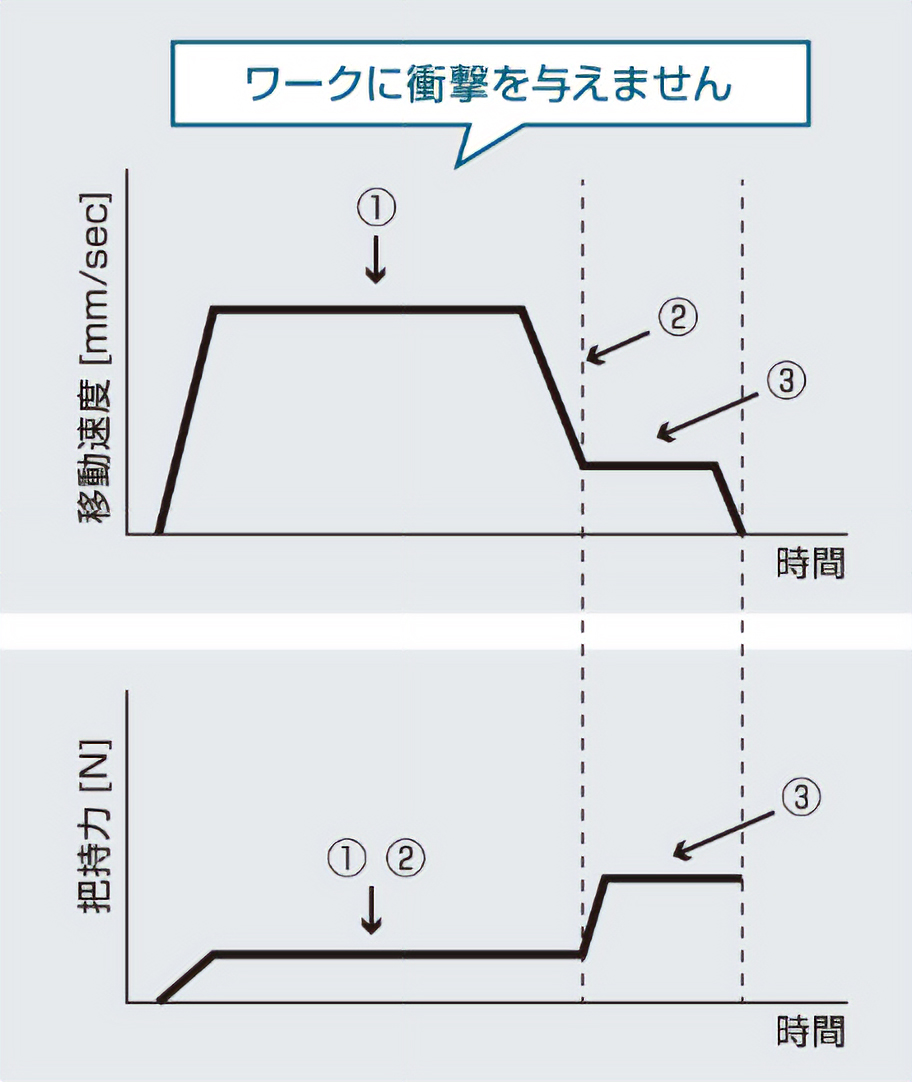
1台で様々なワークを把持
EHシリーズは、把持力を自在に設定できるため、様々なワークに対応可能です。
(ストローク25㎜)
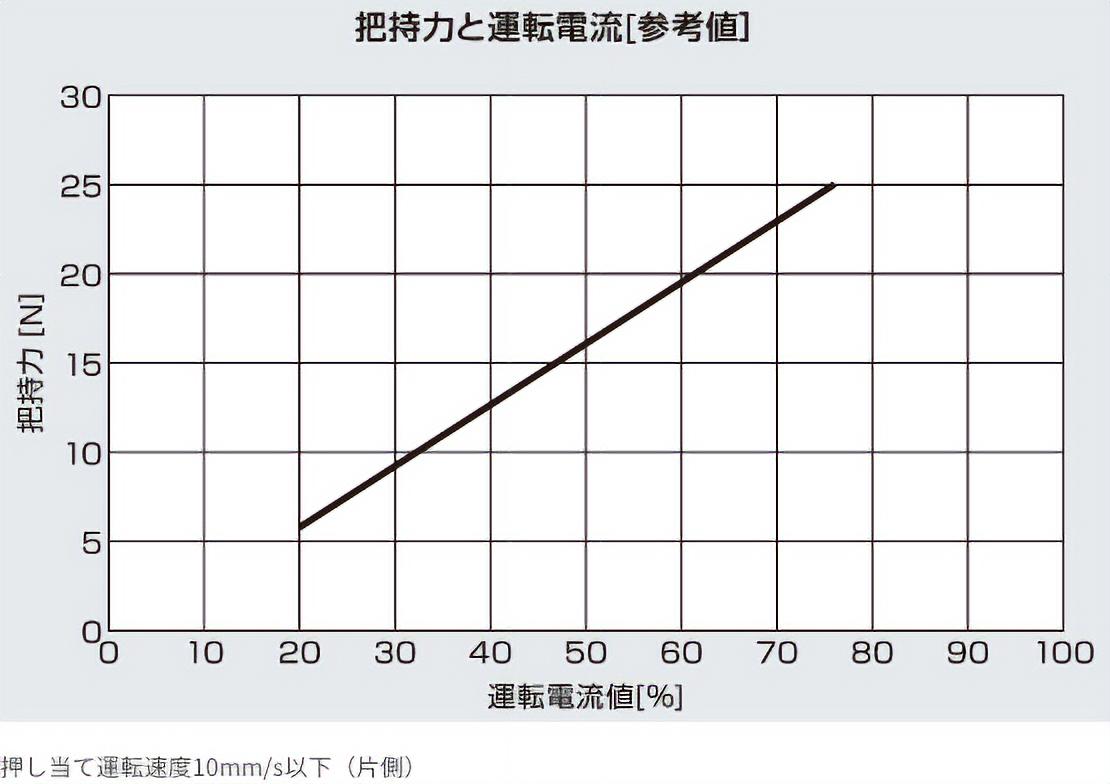
最大把持力 25N
[ 把持力範囲(参考値)約6N~25N ]
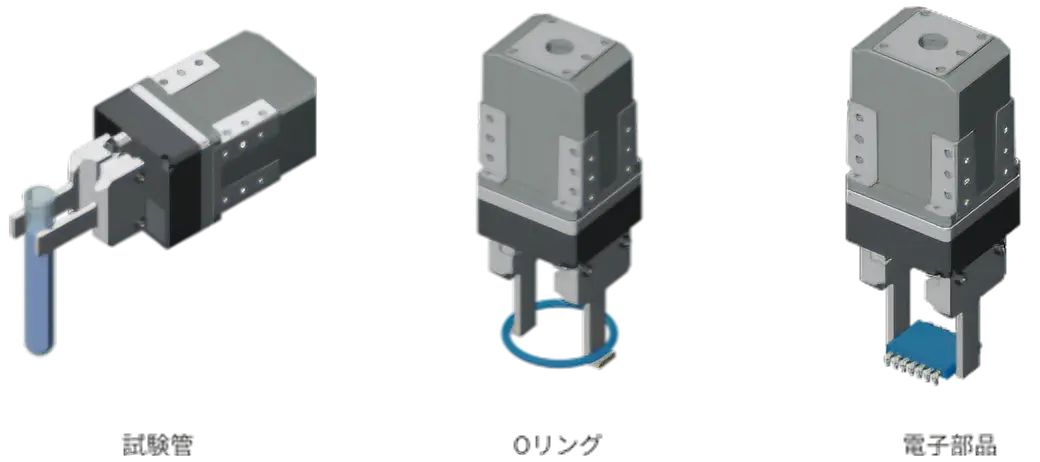
1台で様々な把持を実現
EHシリーズは、ツメの位置・把持時間・把持力を自在に設定できるため、
様々な把持を実現できます。
搭載機器

電動グリッパ EHシリーズ αSTEP AZシリーズ搭載
ラック・ピニオン機構にαSTEP AZシリーズを組み合わせた電動グリッパです。人の指先のようなデリケートな「つかみ」を実現し、自動化・省人化をお手伝いします。
全軸共通
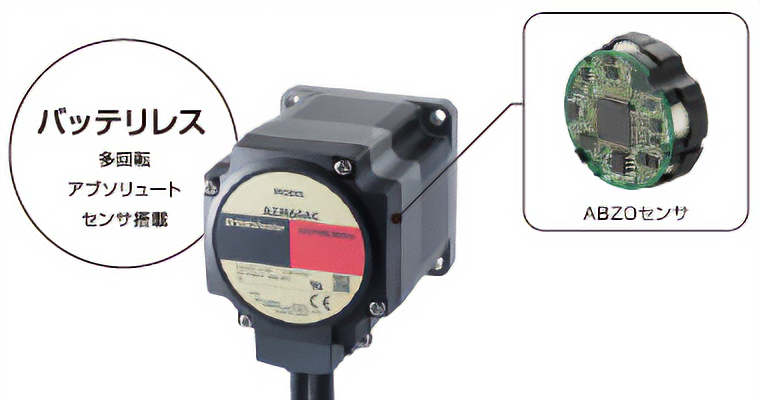
αSTEP AZシリーズ
機械式アブソリュートセンサで位置情報を保持
AZシリーズはバッテリレス機械式アブソリュートセンサ<ABZOセンサ>を搭載。位置決め運転中に電源が非常停止や停電による遮断されていても位置情報を保持します。
テクニカルレポート RENGA
お役に立つ技術情報や、当社の製品開発に関する取り組みについてご紹介する技術コンテンツです。ABZOセンサの構造・原理についてご説明します。
豊富なラインアップをご用意
取付角寸法やトルク特性、電磁ブレーキ付など豊富なラインアップをご用意しています。
各軸に最適なモーターを選定することが可能です。
ドライバ(多軸ドライバ)
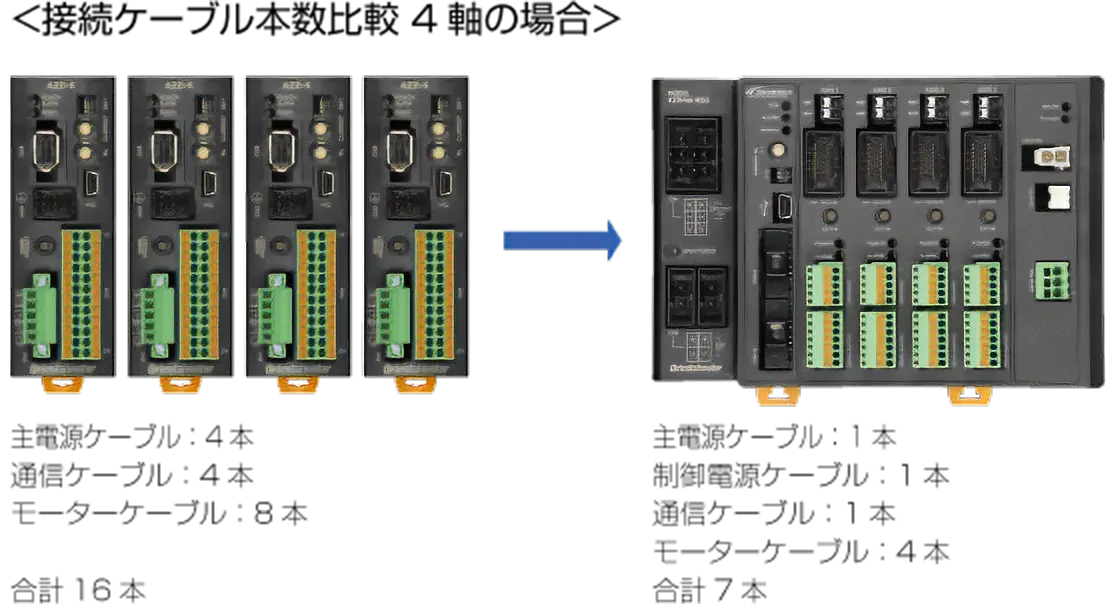
ドライバを集約し、省配線化を実現
多軸ドライバは、2~4軸までモーターを接続可能です。
ドライバを1台に集約できるため、上位機器との接続ケーブルや電源ケーブルなどの省配線化が可能です。
様々なモーションネットワークに対応
MECHATROLINK-Ⅲ、EtherCAT、SSCNETⅢ/Hドライバプロファイルに対応した製品をご用意しています。
搭載機器

αSTEP バッテリレス アブソリュートセンサ搭載 AZシリーズ
当社独自のクローズドループ制御を採用したαSTEPに、新開発のABZO(アブゾ)センサを搭載。アブソリュート方式の位置決めをバッテリ不要で可能にしました。先進の位置決めをお求めやすい価格で実現します。

αSTEP AZシリーズ 多軸ドライバ DC電源入力
当社のAZシリーズDC電源入力のモーターと、それらを搭載している電動アクチュエータを接続できる多軸ドライバです。SSCNETIII/H、MECHATROLINK-III、EtherCATドライブプロファイルに対応した製品をそれぞれご用意しています。
製品選定段階からロボットの内製をサポート
モーターの選定をサポート
専任スタッフがお客様に代わってモーターを選定します。
選定依頼書をダウンロードし、必要事項を記入の上、お問い合わせフォーム※からご依頼いただくか 、お近くのお客様ご相談センターへFAXでお送りください。
機構の概略図やイメージ図、CADデータなどお手持ちの資料からでも対応します。
- ※ ユーザー登録・ログインが必要です。

-
<垂直多関節ロボット>
選定依頼書のダウンロードはこちら -
<スカラロボット>
選定依頼書のダウンロードはこちら <直交ロボット>
選定依頼書のダウンロードはこちら
-
デモ機に関する資料をご用意
ご紹介した垂直多関節ロボットデモ機に関する情報をご用意しています。各軸の寸法・アーム長などのハードウェアに関する情報につきましては、
最寄りの営業所へお問い合わせください。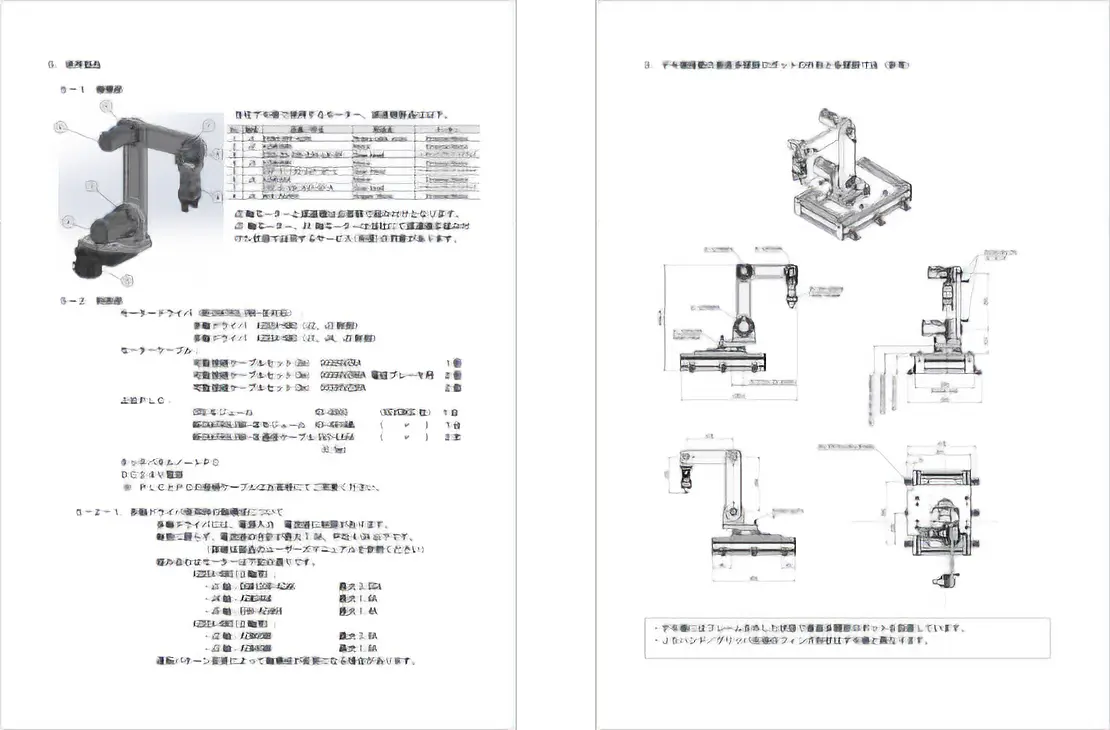
-
PLCとの接続資料をご用意
代表的なメーカーのPLCのネットワークユニットと接続する場合の資料をご用意しています。設計・立ち上げの時間短縮に貢献できますので、ぜひご活用ください。
ダウンロードはこちら。
関連コンテンツ

多品種パーツ供給装置
さまざまなサイズのパーツを、パーツフィーダのように1つずつ供給する装置です。指定されたパーツをストッカーからラック・ピニオン機構で切り出し、供給口まで搬送します。

ワーク処理装置
ワークへ自動で液体塗布をおこなう装置です。ワークを加工位置に合わせて昇降旋回ユニットで上昇旋回し、直交ロボット(ガントリユニット)でさまざまなサイズや形状のワーク処理をおこないます。


スカラロボット(水平多関節ロボット)
ワークのピック&プレイスや工程間搬送を自動化させた内製(自作)スカラロボットです。従来、人の手作業で行っていた接着、計測、組み立てを自動化させたラインで使用しています。

4軸多関節ロボットアーム
AZシリーズを搭載したロボットアームです。平行リンク機構により手首軸を制御することなく先端を水平に保ちます。(オリムベクスタWEBサイトへリンクします。)