【内製ロボット導入手順】STEP1. ロボットの仕様決定
実現したい動きの確認
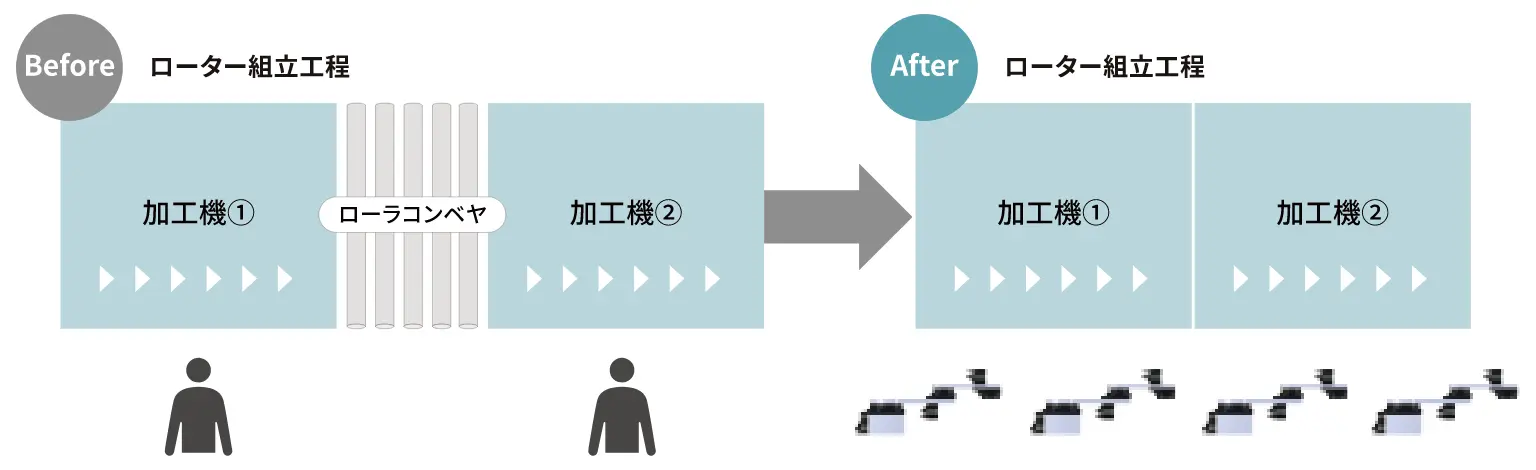
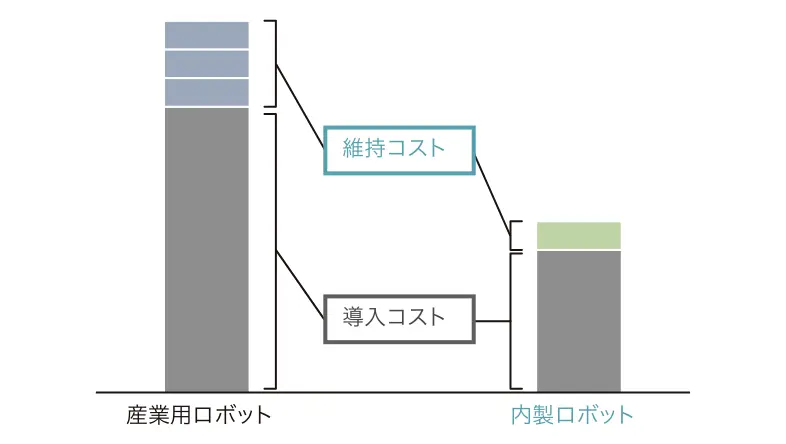
社内設備では、工程間のワーク搬送を自動化するためにロボットを導入しました。ロボットに求める仕様、要件をご紹介します。
ロボット導入の目的
| 既存ライン | 目指す姿 | |
|---|---|---|
| 標準サイクルタイム | 25秒/台 | 25秒/台 |
| ライン内作業人数 (配膳を除く) |
2人 | 0人 2人の省人化 |
内製ロボットに求める仕様、要件
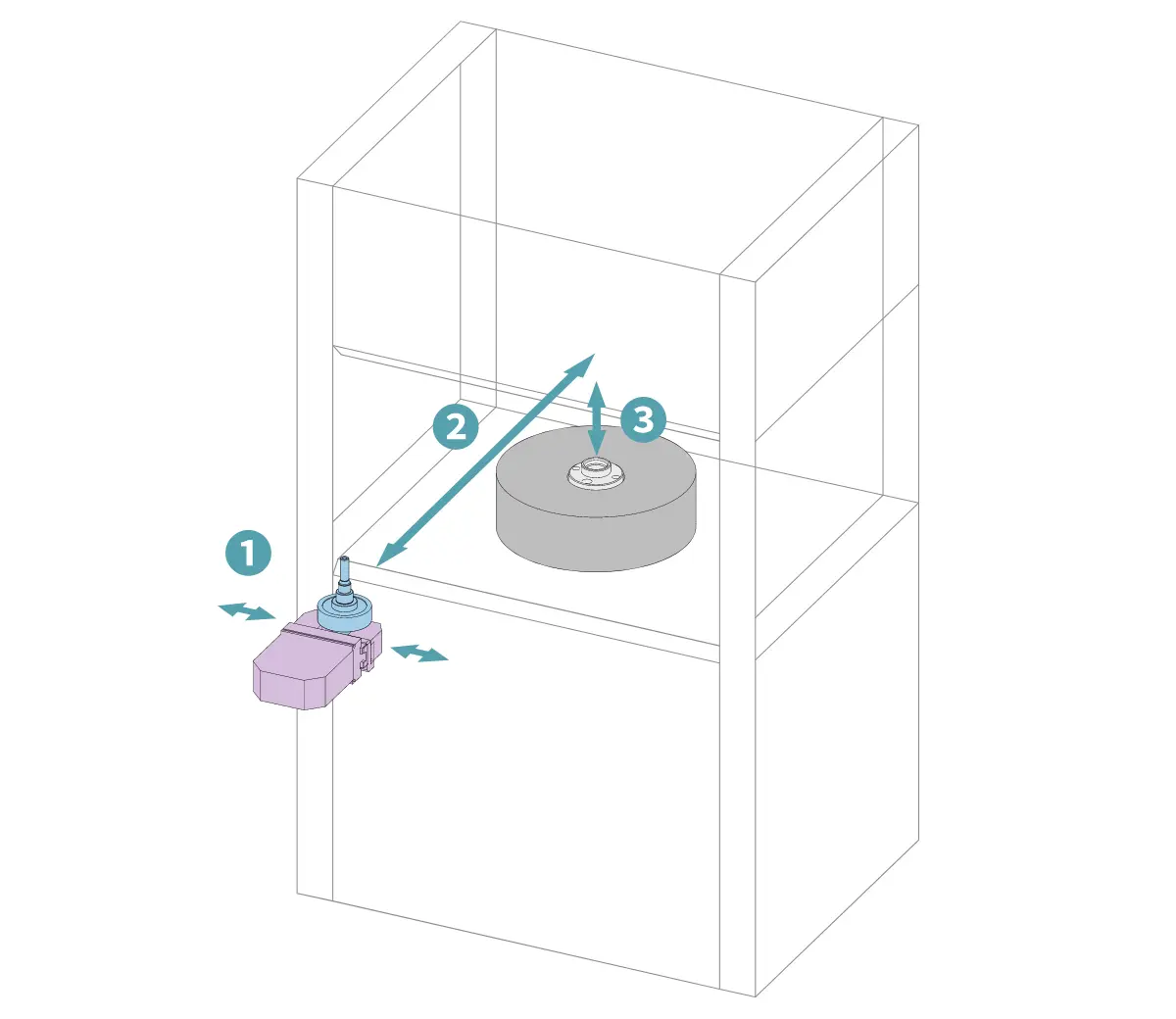
必要な動き
- ワーク把持
- 搬出・搬入
- 垂直移動による脱着
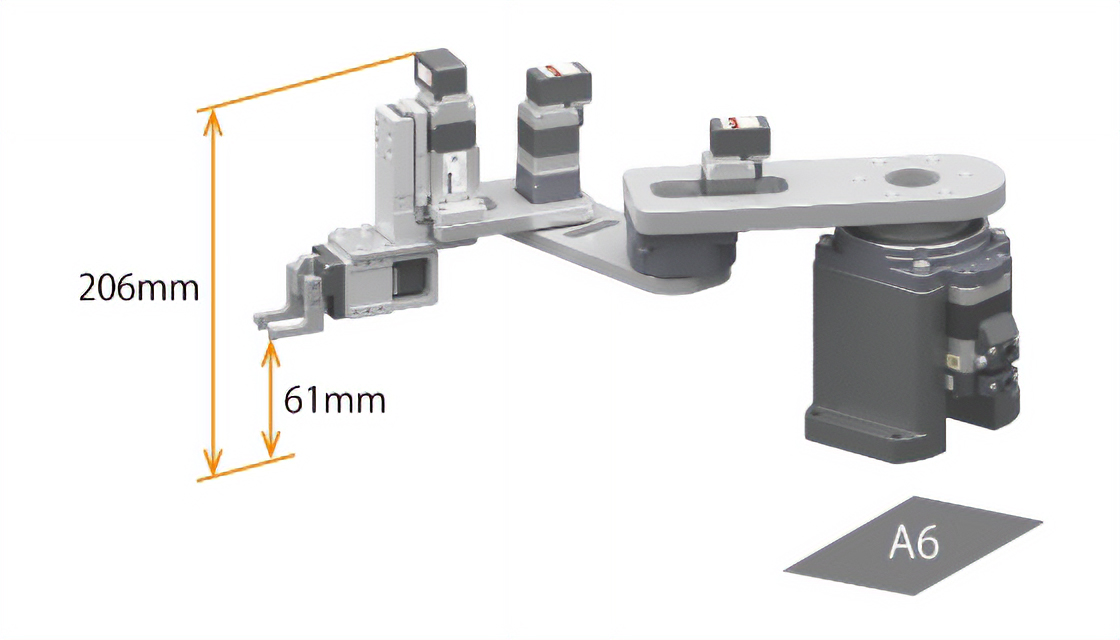
動きの条件
| 搬送物(ワーク)の重量 | 最大500g |
|---|---|
| 必要なリーチ長さ | 最大500mm |
| 移動時間 | 人の作業時間と同等以下の時間で作業完了 |
ロボットタイプの決定
必要な動きやロボット導入の制限事項を考慮し、適したロボットタイプを選択する必要があります。社内設備に水平多関節ロボットを導入する上で検討したポイントをご紹介します。
各ロボットの特徴・使い分け
|
垂直多関節ロボット 
|
水平多関節ロボット 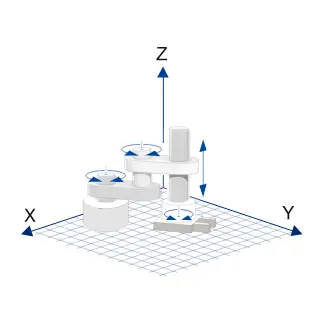
|
直交ロボット 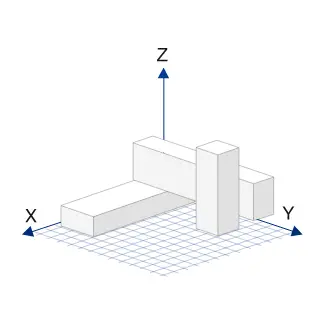
|
|
|---|---|---|---|
| 可動範囲 | 広い | 狭い 直交ロボットと比較するとY軸方向の可動範囲は広い |
狭い |
| 設置面積 | 狭い | 広い | |
| 位置決め精度 | 精度が出しにくい | 精度が出しやすい | |
| 剛性 | 低い | 高い | |
| 速度 | 遅い | 速い | 速い |
| 対応可能な ワークの大きさ |
大〜小 | 小 | 大〜小 |
ロボットタイプを検討する上での検討ポイント
| 選定要件 | 希望 | 垂直多関節 ロボット |
水平多関節 ロボット |
直交 ロボット |
|---|---|---|---|---|
| 設置面積 | 限られたスペース内に 導入したい |
◯ | ◯ | △ |
| 可動範囲 | 設備入口に高さ制限あり | ◯ | ◯ | ◯ |
| ロボットに 求める動き |
脱着・搬送 (ひねり動作必要なし) |
◯ オーバースペック |
◯ | ◯ |
製品選定段階から装置設計をサポート
- 専任スタッフがお客様に代わってモーターを選定します。
- 当社内製装置の仕様や外形寸法に関する資料をご用意しています。
詳細は電話、またはWEBからお問い合わせください。
ロボットの内製化






ロボット本体やコントローラがなくてもオフラインでティーチング可能な MRC Studio Simulator詳細へ

ロボット本体やコントローラがなくてもオフラインでティーチング可能な MRC Studio Simulator
関連製品


関連コンテンツ
搬送ロボットへのソリューション提案詳細へ

搬送ロボットへのソリューション提案
「低床・スリム設計」「高耐荷重性能」「停止位置の設定・微調整」「まっすぐ走る・避ける・止まる」ことを実現可能にする各種搬送装置をご紹介します。
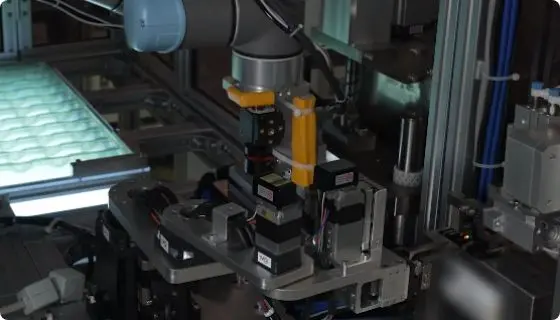
スカラロボット(水平多関節ロボット)詳細へ
スカラロボット(水平多関節ロボット)
ワークのピック&プレイスや工程間搬送を自動化させた内製(自作)スカラロボットです。従来、人の手作業で行っていた接着、計測、組み立てを自動化させたラインで使用しています。
ワーク処理装置詳細へ
ワーク処理装置
ワークへ自動で液体塗布をおこなう装置です。ワークを加工位置に合わせて昇降旋回ユニットで上昇旋回し、直交ロボット(ガントリユニット)でさまざまなサイズや形状のワーク処理をおこないます。