AZシリーズ 基本機能マニュアル 運転 : 位置と速度を制御する
AZシリーズの基本的な機能について説明した簡易マニュアルです。機能の詳細については取扱説明書(機能編)をご確認ください。
当コンテンツの対象製品は、AZD-A/AZD-C/AZD-K/AZD-AD/AZD-CD/AZD-KD/AZD-AX/AZD-CX/AZD-KXです。
絶対位置決め
原点を基準とした座標の目標位置を設定します。
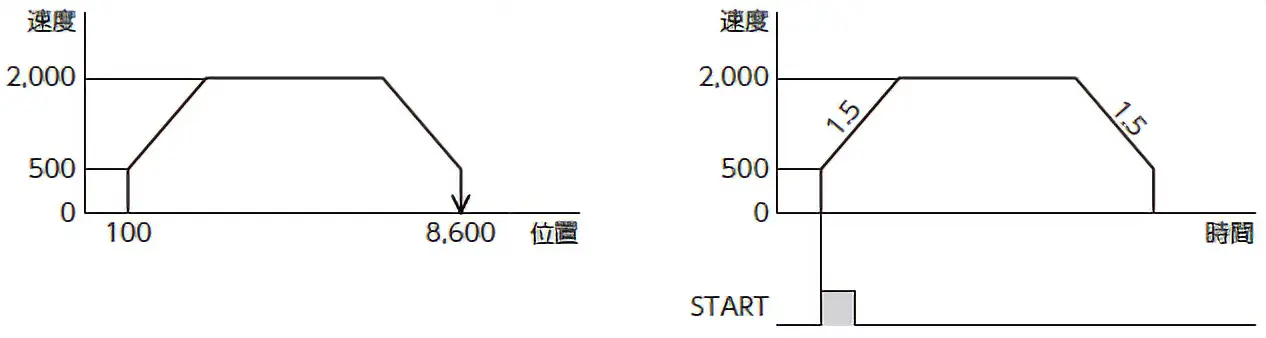
指令位置100の位置から、目標位置8,600へ運転する場合
【運転データの設定】

【運転イメージ】
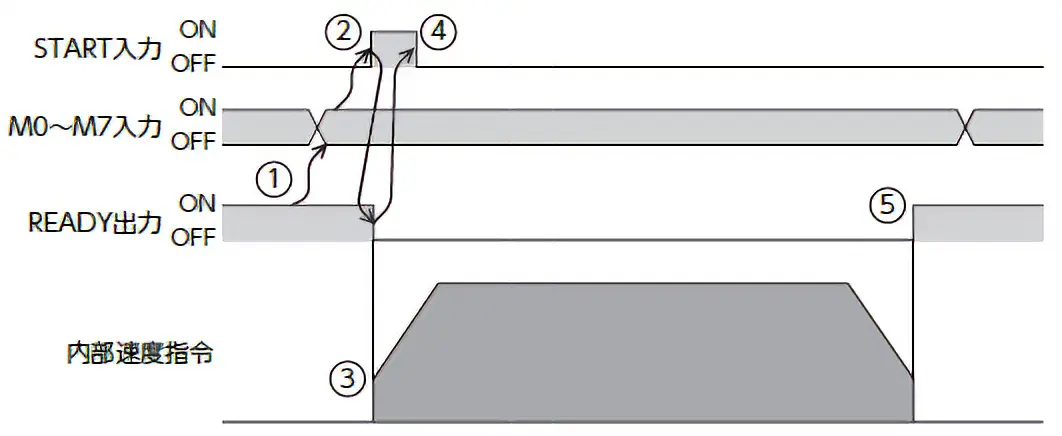
【運転方法】
- READY出力がONであることを確認します。
- M0~M7入力で運転データNo. を選択し、START入力をONにします。
- READY出力がOFFになり、モーターが運転を開始します。
- READY出力がOFFになっていることを確認し、START入力をOFFにします。
- 運転が終わると、READY出力がONになります。
相対位置決め(指令位置基準)
現在の指令位置から目標位置までの移動量を設定します。
指令位置100の位置から、目標位置8,600へ運転する場合
【運転データの設定】

【運転イメージ】
【運転方法】
- READY出力がONであることを確認します。
- M0~M7入力で運転データNo. を選択し、START入力をONにします。
- READY出力がOFFになり、モーターが運転を開始します。
- READY出力がOFFになっていることを確認し、START入力をOFFにします。
- 運転が終わると、READY出力がONになります。
絶対位置決め押し当て、相対位置決め押し当て(指令位置基準)
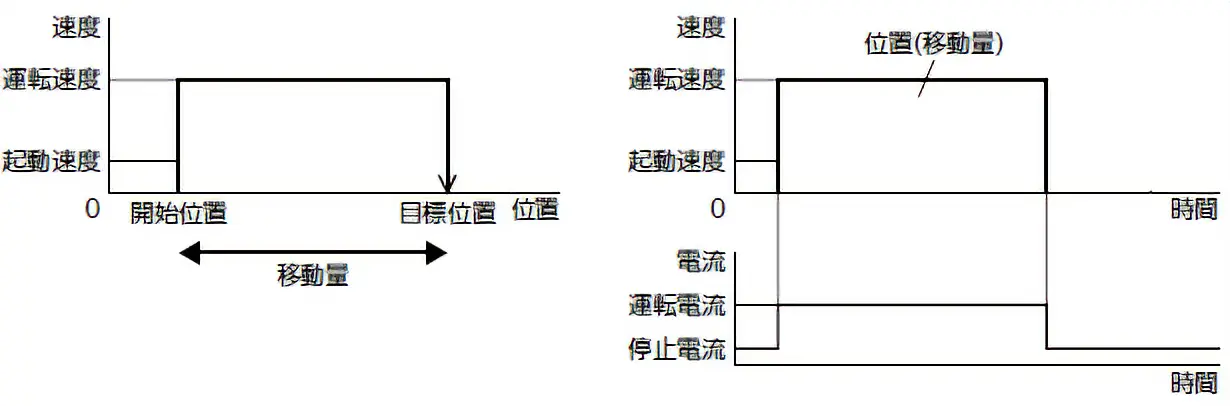
位置決め押し当て運転(位置決め押し当てSD運転)を実行すると、運転データに設定した運転速度で自起動運転を行ないます。その後、速度を維持したまま運転をし、目標位置に到達すると止まります。また、TLC出力を押し当て運転の完了信号として使用すると、運転中に負荷との押し当てが起きたか判断することができます。
運転動作 開始位置<目標位置(FWD方向)の場合
重要
- 位置決め押し当て運転の移動量は-2,147,483,648~+2,147,483,647 stepです。モーターの移動量が上限または下限の最大移動量を超えると、運転データ異常のアラームが発生します。
- 位置決め押し当て運転は自起動運転のため、運転速度が速すぎるとモーターが正常に動作しないことがあります。
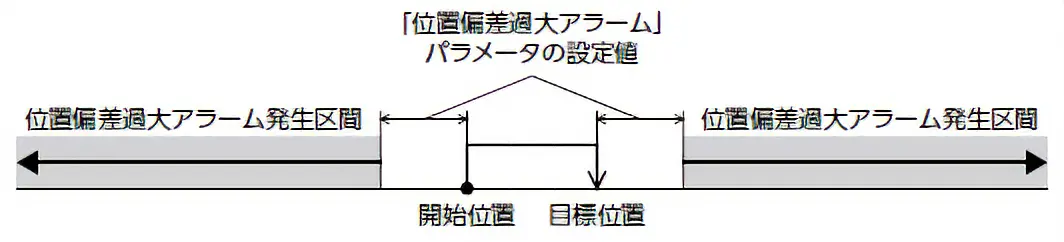
- 外力によってモーターが位置偏差過大アラーム発生区間に移動すると、位置偏差過大のアラームが発生します。
補足
- 位置決め押し当てSD運転の回転方向(FWD/RVS)は、運転データの「位置」の設定で決まります。プラスの値を設定するとFWD方向、マイナスの値を設定するとRVS方向へ回転します。
- 運転データの「速度」にマイナスの値を設定したときは、絶対値の速度として動作します。
絶対位置決め押し当て
原点を基準とした座標上の目標位置を設定します。
【運転データの設定 現在位置から目標位置8,600へ運転する場合】

相対位置決め押し当て(指令位置基準)
現在の指令位置から目標位置までの移動量を設定します。
【運転データの設定 指令位置100の地点から目標位置8,600へ運転する場合】

関連項目
-
ABZOセンサの値をドライバにコピーする
-
分解能(最小移動量)の設定
-
原点の設定
-
ラウンドの設定
-
入力信号
-
出力信号
-
運転
-
ABZOセンサの値をドライバにコピーする
-
原点の設定
-
入力信号
-
運転
-
分解能(最小移動量)の設定
-
ラウンドの設定
-
出力信号