AZシリーズ 基本機能マニュアル 分解能(最小移動量)の設定 : モーター(標準タイプ/ギヤードタイプ)の場合
AZシリーズの基本的な機能について説明した簡易マニュアルです。機能の詳細については取扱説明書(機能編)をご確認ください。
当コンテンツの対象製品は、AZD-A/AZD-C/AZD-K/AZD-AD/AZD-CD/AZD-KD/AZD-AX/AZD-CX/AZD-KXです。
標準タイプのモーターや、ギヤードタイプのモーターが対象です。 モーターを、機構と組み合せて使用するときは分解能を設定してください。
- 例:標準タイプのモーターを、ボールねじ機構と組み合わせる
- 例:ギヤードタイプのモーターを、回転テーブル機構と組み合わせる

ユーザー単位系設定支援ウィザードを使う
MEXE02の「ユーザー単位系設定支援ウィザード」で、表示単位と分解能(最小移動量)を設定します。移動量や速度などを任意の単位で表示したり、入力することができます。
例として、直動機構と組み合わせた場合の設定を説明します。
-
「ユーザー単位系設定支援ウィザード」で、表示単位と分解能を設定します。
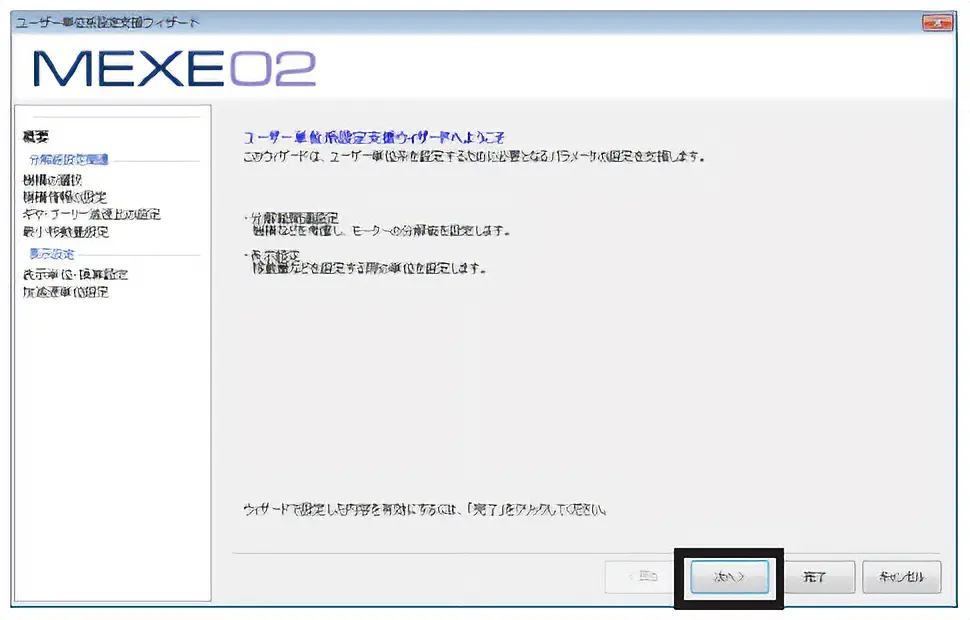
1-1. 「ユーザー単位系設定支援ウィザード」をクリックします。ユーザー単位系設定支援ウィザードの画面が表示されます。「次へ」をクリックします。
1-2. 使用する機構を選択します。「直動」を選択し、「次へ」をクリックしてください。

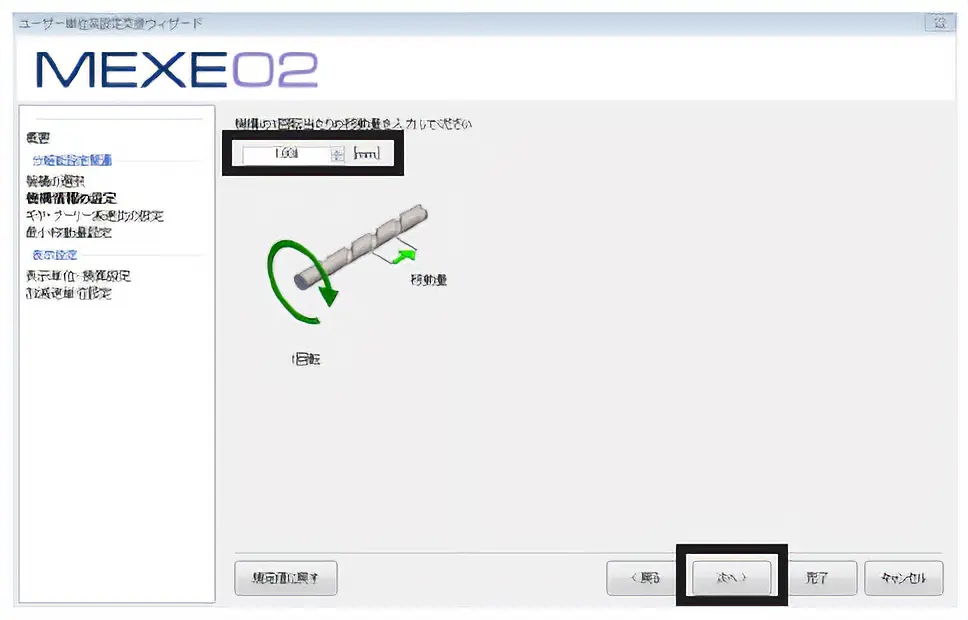
1-3. 1回転あたりの移動量を設定します。ここでは「1 mm」とします。「1」を入力し、「次へ」をクリックしてください。
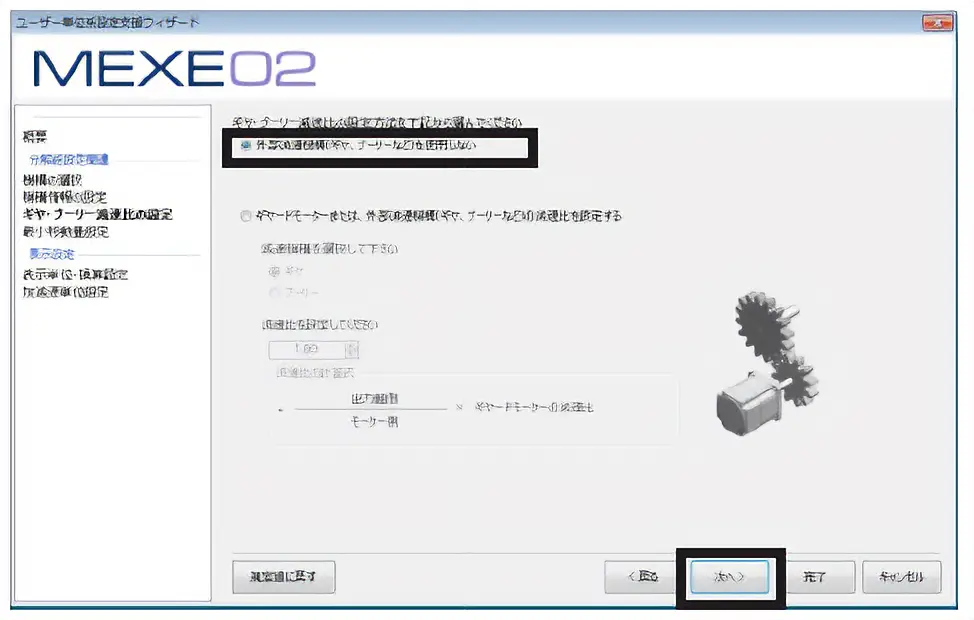
1-4. ギヤの減速比を設定します。ここでは、出荷時設定のまま使用します。「外部減速機構(ギヤ、プーリーなど)を使用しない」を選択し、「次へ」をクリックしてください。
1-5. テーブルの最小移動量を設定します。ここでは「0.0005 mm」とします。「0.0005」を入力し、「次へ」をクリックしてください。
- ※1
- 設定した内容が表示されます。設定に誤りがあると赤字で表示されるので、設定しなおしてください。
- ※2
- 設定に誤りがあると、誤りの内容や対処方法などが表示されます。

1-6. 表示単位を設定します。ここでは「mm」を選択し、「次へ」をクリックしてください。
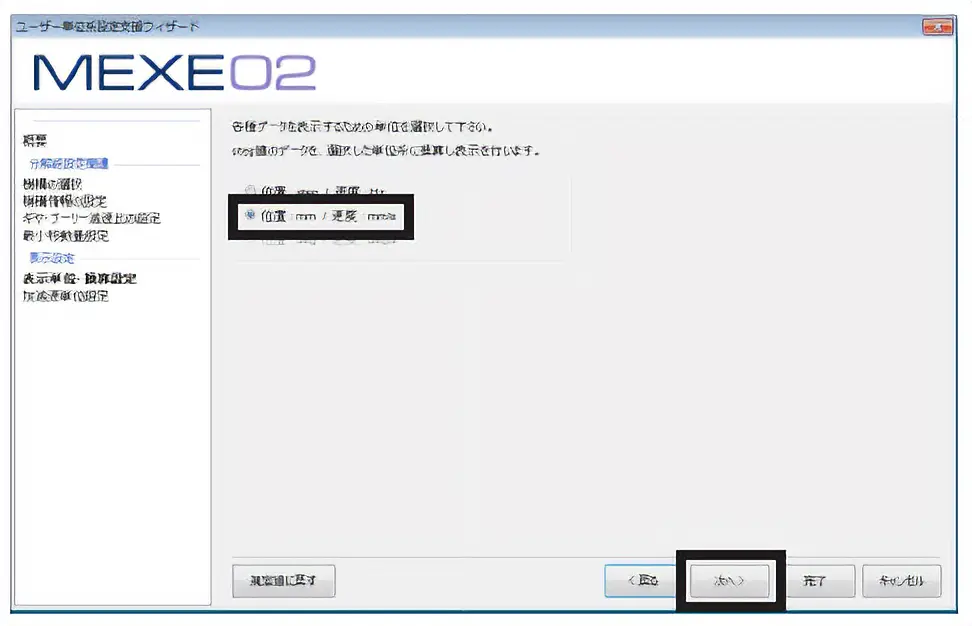
- 補足
- ネットワークで動作させるときの単位は、「step」になります。
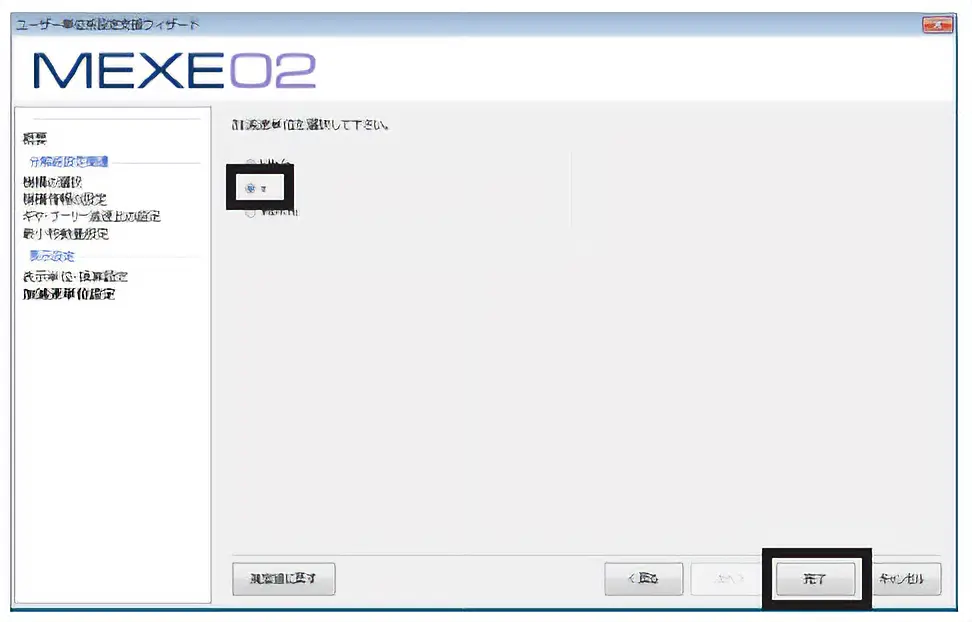
1-7. 加減速単位を設定します。 ここでは「s」を選択し、「完了」をクリックしてください。
-
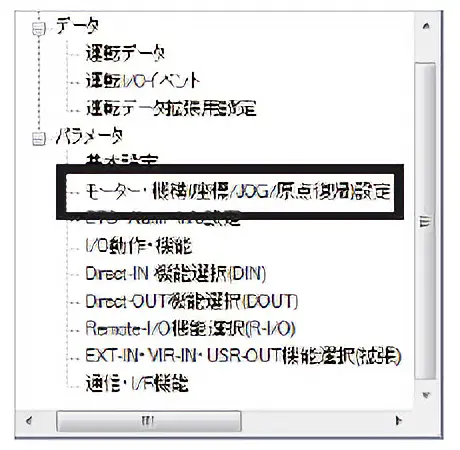
ドライバに設定したパラメータを優先させるため、「機構諸元設定」パラメータを「マニュアル設定」にします。
2-1. ツリービューから、「パラメータ」-「モーター・機構(座標/JOG/原点復帰)設定」をクリックします。モーター・機構パラメータが表示されます。
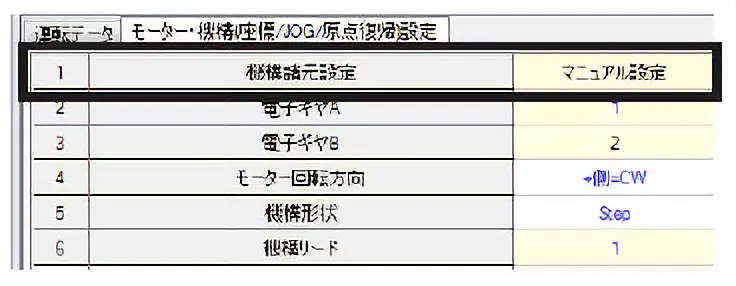
2-2. 「機構諸元設定」パラメータを「マニュアル設定」に変更します。
-
パラメータをドライバに書き込みます。
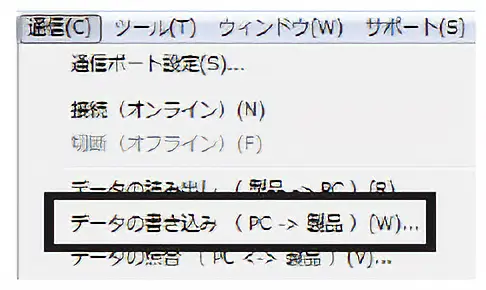
3-1. 「通信」メニューの「データの書き込み」、またはツールバーの「データの書き込み」アイコンをクリックします。
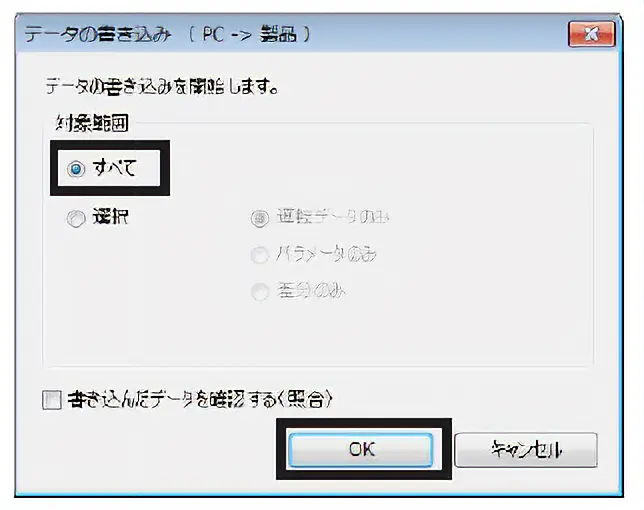
3-2. 対象範囲を「すべて」にし、「OK」をクリックします。
3-3. 「はい」をクリックします。パラメータの書き込みが始まります。
3-4. 「OK」をクリックし、ドライバの電源を再投入するとパラメータが反映されます。
ユーザー単位系設定支援ウィザードを使わない
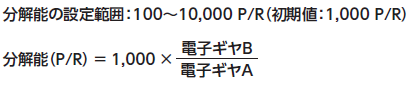
「電子ギヤA」パラメータと「電子ギヤB」パラメータを設定すると、モーター出力軸1回転あたりの分解能を設定できます。算出して得られた値は、次の設定範囲に収めてください。
【関連するパラメータ】
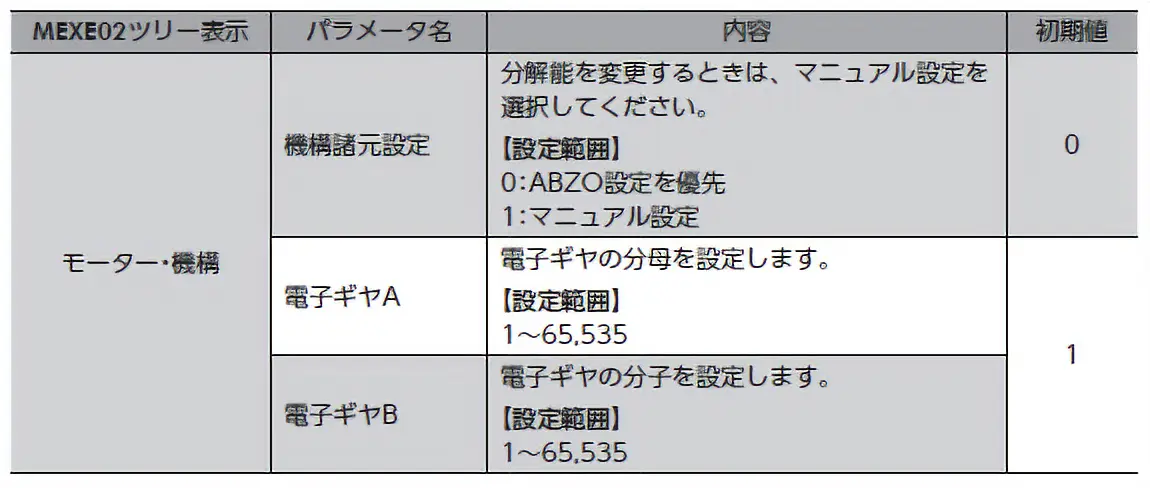
重要
- 「機構諸元設定」パラメータを変更したときは、ドライバの電源を再投入してください。設定範囲外の分解能を設定すると、電子ギヤ設定異常のインフォメーションが発生します。電子ギヤ設定異常のインフォメーションが発生している状態で、電源を再投入またはConfigurationを実行すると、電子ギヤ設定異常のアラームが発生します。
- 「プリセット位置」パラメータが「0」以外の状態でプリセットを行なった後に、分解能を変更したときは、もう一度プリセットを実行してください。「プリセット位置」パラメータが「0」のときは、分解能を変更しても現在位置が自動で再計算されます。
- 補足
- パルス列入力タイプの場合は、ドライバのスイッチ(SW1)でも分解能の設定が可能です。詳細については、取扱説明書(ドライバ編)をご確認ください。
関連項目
-
ABZOセンサの値をドライバにコピーする
-
分解能(最小移動量)の設定
-
原点の設定
-
ラウンドの設定
-
入力信号
-
出力信号
-
運転
-
ABZOセンサの値をドライバにコピーする
-
原点の設定
-
入力信号
-
運転
-
分解能(最小移動量)の設定
-
ラウンドの設定
-
出力信号