テクニカルレポート RENGA
RENGAは1966年3月に第1号を発行して以来、お客様のお役に立つ技術情報やオリエンタルモーターの研究開発に関する取り組みをお伝えしているテクニカルレポートです。(論文形式)
<RENGAの意味>
レンガが建物に用いられたのは、古代メソポタミアの時代からです。
6000年を経た今日でも使われているということは、高度に標準化された進歩的な素材であることを物語っています。
当社の製品、部品が高度に標準化されていることと、当社の建物の一部にレンガが用いられていたことから、"RENGA"と名付けました。
一覧
製品カテゴリから閲覧したいテーマの絞込みをおこなえます。
製品カテゴリから選ぶ
2024.2.15NEW
AZシリーズ モーターのケーブル1本化技術
スペース削減など配線のしやすさを向上するために実施した、モーターやケーブルのノイズ対策について説明します。
2023.6.9
径方向誘導式ハイブリッド型を用いたステッピングモーターの高トルク化技術
高トルク化技術の原理を説明し、位置決め時間短縮効果や損失及び漏れ磁束の低減について既存製品と比較検証します。

2022.12.28
ブラシレスモーターによるカーボンニュートラルへの貢献
高効率モーターによる電力消費量削減効果を、動作点が変化するコンベアの可変速駆動を例として、効率マップを用い検証します。

2022.8.19
ロボットコントローラMRC01の開発および設備へのロボット導入事例
内製した、さまざまな構造のロボットを制御できるコントローラを開発しました。製品の特徴や技術について説明します。
2022.4.28
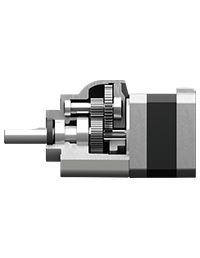
平行軸歯車減速機構の同心軸ギヤ開発
同じ取付角寸法でも歯車や軸受を大型化し、許容トルクと許容ラジアル荷重を大幅に向上した新構造の同心軸ギヤです。

2021.10.27
誘導電動機とファンモーターのエネルギー効率規制の最新状況
CO2排出削減を目指し、世界で効率規制が広がっています。EU、中国の規制内容とその背景および当社の対応を説明します。

2021.6.30
電動グリッパ EHシリーズの特長と機能
空気圧グリッパに比べ、把持力を繊細に調整できます。剛性が低いワークの把持、ワークの寸法測定の方法を説明します。

2020.10.30
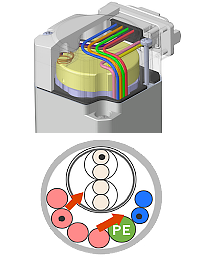
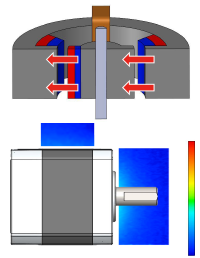
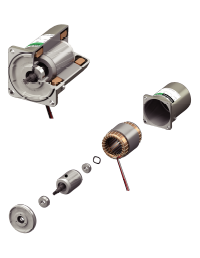
防塵・防水ブラシレスモーターの設計と基礎技術
経年劣化を考慮した評価基準を満たす防塵・防水性と、2層塗装の採用により高い耐食性を備えたモーターを説明します。

2020.5.25
ブラシレスモーター BLHシリーズ ドライバの性能向上
ベクトル制御を採用し、速度追従性の向上や低騒音化を実現したドライバを新たに開発しました。その技術を説明します。

2019.11.27
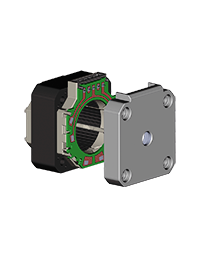
AZシリーズ 小型ドライバ(AZD-KRD)の開発
体積84 %・質量74 %削減し、さらに省配線化が可能です。多関節ロボットなどで、モーターの近くに配置できるドライバです。

2019.6.7
コンパクト電動シリンダ DRシリーズの構造と位置決め精度
高精度位置決めが可能であり、用途を広げるためにガイド種類を追加したDRシリーズの構造や特長を紹介します。

2019.2.28
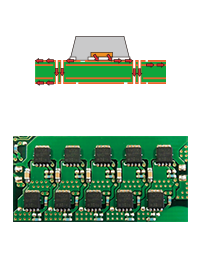
CVKシリーズ(CVDシリーズ)Sタイプドライバの開発
低振動などの優れた特性を持つCVKシリーズドライバの基板実装タイプを開発しました。追加機能や仕様を紹介します。
2018.12.13
PKPシリーズ 小型・薄型コネクタ搭載モーターの開発
コネクタ部の低背化に加えて、トルクアップや振動の低減、許容荷重の向上を実現した、PKPシリーズについて紹介します。
2018.7.13
ACモーター KⅡシリーズ 特性向上の取り組み
KⅡシリーズは世界各国の電圧仕様で最適な特性となるよう設計されました。その特性改善技術を紹介します。

2014.10.16
スピードコントロールモーターユニット DSCシリーズの特長と制御技術
DSCシリーズの特長と、瞬時正逆運転、および巻き下げ運転や上下駆動を実現する制御技術について紹介します。

2014.10.16
バッテリレスアブソリュートセンサ ABZOセンサ搭載 クローズドループステッピングモーターユニット AZシリーズの開発
AZシリーズを紹介し、「パルス列入力タイプ」にアブソリュートシステムを適用した場合の利点とその使い方を解説します。
2014.10.16
ステッピングモーターユニット CVKシリーズ(CVDシリーズ)用ドライバの制御と回路技術
CVKシリーズ用ドライバの制御と回路技術について紹介します。

2014.10.16
RKⅡシリーズ小型直交軸 FCギヤードタイプの開発
RKⅡシリーズと組み合わせた「FCギヤードタイプ」の構造及び特徴について紹介します。
2014.10.16
AC入力プロペラファン MUシリーズ 防湿タイプの開発
商品の特長、防湿仕様の設計条件と検証結果について紹介します。

2014.4.30
ブラシレスモーターユニット NexBL BMUシリーズの特長
NexBLモーターの高効率化を達成するための技術と、BMUドライバの新機能について紹介します。

2014.4.30
ステッピングモーターユニット DC電源入力 CVKシリーズ(CVDシリーズ)の特長
CVKシリーズの概要や特性、特長について説明します。
2014.4.30
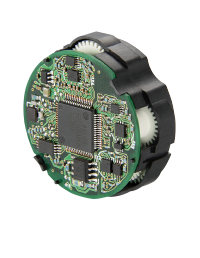
バッテリ不要多回転アブソリュートセンサの開発
バッテリが不要な多回転アブソリュートエンコーダ「ABZO(アブゾ)センサ」およびAZシリーズについて紹介します。

2013.10.31
高性能・高機能ブラシレスモーターユニット BXⅡシリーズの開発
BXⅡシリーズの新機能とそれを実現した新技術について紹介します。


2013.3.29
5相ステッピングモーターユニット RKⅡシリーズの特徴
高効率化技術と最新のデジタル技術を採用したRKⅡシリーズの特性と特徴を紹介します。

2011.12.22
高出力・DC電源入力ブラシレスモーターユニット BLVシリーズの開発
DC電源入力で高出力(200/400W)を実現したブラシレスモーターユニット「BLVシリーズ」の特徴について紹介します。

2011.6.24
真空対応レゾルバセンサを搭載したARシリーズ真空タイプの開発
信頼性を向上のため、当社独自のフィードバック制御技術を搭載した、ARシリーズ真空タイプの開発について紹介します。

2010.10.22
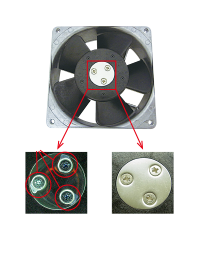
AC長寿命プロペラファン MREシリーズのラインアップ
商品の特徴、長寿命化を支える技術及び信頼性の検証方法について説明します。

2009.11.2
制御モーター用フレキシブルカップリングの特性について
カップリングの種類と特徴、制御モーターと組み合わせて使用した時の特性について説明します。

2008.11.28
回転低下アラーム付DCプロペラファン MDAシリーズについて
回転低下アラーム付DCファン MDAシリーズを使用することのメリットと商品について紹介します。
2008.5.30
脱調レスステッピングモーターユニット ARシリーズの低損失化技術
ARシリーズの低損失化技術としてステッピングモーターの低鉄損化技術を中心に説明します。

冊子版 技術情報誌 RENGAバックナンバー
過去に発行した冊子版の「技術情報誌 RENGA」のバックナンバー(No.172~No.180)を掲載しています。